Journal influence
Bookmark
Next issue
The method of intersegment estimation of the motion patterns from kinematic trajectories registered by exoskeleton system tools
Abstract:The paper considers the method of intersegment estimation of the operator’s motion patterns from kin-ematic trajectories registered by the exoskeleton system tools (further EXO). Its purpose is due to the task of detecting and classifying the movements of the operator of the exoskeleton physical perfor-mance support system in real time for predictive control of the structure executive elements and for forecasting the further human-machine system state. The paper defines kinematic trajectories as limb segment motion projections on the Cartesian coor-dinate system planes. Such projections are grouped by affiliation to the described plane and to the limb segment and represent the informational model of the investigated motion. This statement is also true for the expected motion model expressed in the same way as trajectory patterns. In the framework of the problem of defining motion patterns, the authors propose the method of in-tersegment estimation of kinematic trajectories. The method is based on achievements in biomechanics of human motions, especially in the part of kinematic-cyclic research. The main idea is the search of motion signs represented by one pattern or an ordered sequence in the trajectories described by the limb segments in frontal or sagittal planes. Digital signal processing area is used as basic algorithms for defining motion patterns. The developed method is presented in the form of a model that is the basis of a software prototype. The paper also presents the results of the prototype approbation on empirical da-ta received by the exoskeleton system research platform.
Аннотация:Предложен метод выделения паттернов движения оператора из кинематических траекторий, регистрируемых экзоскелетной системой. Цель построения метода обусловлена задачей обнаружения и классификации движений оператора экзоскелетной системы поддержки физической работоспособности в режиме реального времени для предиктивного управления исполнительными элементами конструкции, а также прогнозирования дальнейшего состояния человеко-машинной системы. В контексте работы кинематические траектории определяются как проекции движения сегмента конечности на плоскости декартовой системы координат. Такие проекции группируются по признаку принадлежности к описываемой плоскости и сегменту конечности и представляют собой информационную модель исследуемого движения. Утверждение справедливо и для модели ожидаемого движения, описанного траекторными паттернами. В рамках задачи выделения паттернов движения предложен метод межсегментной оценки кинематических траекторий, базирующийся на достижениях в области биомеханики движения человека, в частности, на исследованиях кинематики циклического движения. Основная идея заключается в поиске признаков совершаемого движения, представленных в виде одного паттерна или упорядоченной последовательности в траекториях, описываемых сегментами конечности во фронтальной и сагиттальной плоскостях. В качестве базовых алгоритмов для выделения паттерна используется область цифровой обработки сигналов. Разработанный метод представлен в виде модели, на основе которой построен программный прототип. В работе также освещены результаты апробации прототипа на эмпирических данных, полученных при помощи исследовательской платформы экзоскелетной системы.
| Authors: Provotorov N.V. (provotorovworkmail@gmail.com) - Moscow Polytechnic University (Postgraduate Student), Moscow, Russia, Taratonov I.N. (Ilya.taratonov@1221.su) - 'POLDEN. 21-Y VEK' (1221) (Director General), Moscow, Russia, Philippovich Yu.N. (у_philippovich@mail.ru) - Moscow Polytechnic University (Professor), Moscow, Russia, Ph.D | |
| Keywords: predictive management, intersegment estimation, pattern of cyclic motion, analysis of kinematic trajectories, exoskeleton system |
|
| Page views: 2420 |
PDF version article |
В активно развивающейся области экзоскелетных систем (ЭКЗ) крупным направлением являются системы поддержки физической работоспособности человека. Одна из задач таких систем – распознавание образа совершаемого человеком движения и дополнение естественной локомоции для увеличения эффективности путем уменьшения физических затрат оператора. В отечественной [1–3] и зарубежной [4–7] литературе для анализа движения применяются методы, представленные следующими областями: - структурный и клинический анализ движения, имеющий комплексный характер (подометрическая, гониометрическая, динамометрическая, биоэлектрическая и кинематическая составляющие), с экспертной оценкой на основании известных закономерностей и коррелирующих признаков локомоций [8, 9]; - искусственные нейронные сети, в кото- рых осуществляется анализ движения на нали- чие ожидаемых паттернов в исследуемых данных; в работах [4, 6] для этого применяются глубокая сверточная сеть и сеть обратного распространения ошибки; - цифровая обработка сигналов, где в качестве примера для поиска ожидаемого паттерна движения применяется алгоритм динамического сжатия времени (DTW) [5]. Также перспективным направлением является анализ движения в виде электроэнцефалограммы оператора [10, 11]. Чаще всего локомоции рассматриваются путем траекторного (пространственного) способа представления и в виде кривых биоэлектрической активности мускулатуры [12, 13]. В настоящий момент большими преимуществами по сравнению с представленными выше методами обладает описание движения в виде траекторного представления. Это обусловлено количеством информационной составляющей в модели движения, большей простотой регистрации физиче- ского параметра и особенностями применения измерительной системы в составе внешней конструкции ЭКЗ [9, 14]. На основании этого данный способ описания выбран в качестве основного при формировании информационной модели. В отличие от ранее представленных методов распознавания движения межсегментная оценка предлагает анализ паттернов, выделенных из кинематических траекторий посредством взаимного сопоставления полученных признаков в активных (участвующих в локомоции) сегментах конечности. Данный метод применяется авторами в ЭКЗ нижних конечностей поддержки физической работоспособности оператора. Построение метода обусловлено необходимостью обнаружения и классификации движений оператора ЭКЗ поддержки физической работоспособности в режиме реального времени для предиктивного управления исполнительными элементами конструкции, а также прогнозирования дальнейшего состояния человеко-машинной системы. Метод направлен на решение задачи выделения ожидаемого сигнала из регистрируемых траекторий с целью дальнейшего обнаружения. Для выполнения первичного прототипирования и оценки применимости предлагаемого метода при построении модели сделаны допущения об исключении ландшафтных особенностей местности при регистрации кинематических траекторий. Идея, положенная в основу подхода к выделению ожидаемого паттерна, заключается в представлении совершаемого движения в виде кинематических траекторий, описанных в нескольких плоскостях для выделенной группы сегментов конечности [8, 9]. Алгоритм выделения предполагает обработку входных данных в несколько этапов: - проход группой паттернов движения по регистрируемой кинематической траектории с целью получения сырых (до прохождения через систему критериев фильтра) отметок потенциального расположения ожидаемого сигнала в каждой рассматриваемой плоскости; - фильтрация сырых отметок для подавления шума и сигналоподобных всплесков; - применение межсегментной режекции последовательностей с данными потенциаль- ного местонахождения ожидаемого паттерна. Применяемая информационная модель движения
Значения, полученные измерительной системой, представляют собой временные ряды, сгруппированные по признаку принадлежности к рассматриваемой плоскости и к сегменту конечности, являются одним из входных наборов для алгоритма выделения ожидаемого паттерна и далее обозначаются как исследуемый сигнал. Сигнал представлен в виде двух наборов – Bin и Gin:
Из исследуемого сигнала выделяется ожидаемый сигнал, который представлен в виде набора дискретных последовательностей, являющихся участком определенного движения (паттерн движения). Аналогично исследуемому сигналу ожидаемые паттерны сгруппированы по признаку принадлежности конечности к плоскости, в которой описывается траектория, и типу движения. Формально паттерн дви- жения представляется как один из наборов траекторий в Pm = pmotion1 … pmotionN. В общем случае
(incl – интервал действительных чисел на отрезке от –40 до 40, который справедлив только для текущего (рассматриваемого) набора паттернов циклического движения). Модель выделения ожидаемого паттерна из регистрируемых кинематических траекторий на базе представленного метода
Исходя из того, что общая формулировка задачи сводится к оценке корреляции известного сигнала с неизвестным, принято решение воспользоваться понятием согласованной фильтрации из области обработки сигналов. В этом случае решение задачи эквивалентно свертке неизвестного сигнала с сопряженной версией шаблона, обращенной во времени. Согласованный фильтр является оптимальным линейным фильтром для максимизации отношения сигнал/шум (SNR) в присутствии аддитивного стохастического шума. Общий принцип работы блока выделения базируется на применении к функциям f и g операции свертки, которая соответствует взаимнокорреляционной функции f(x) и g(–x). В качестве функции f(x) выступают регистрируемые кинематические траектории движения Bin и Gin. Размерность f(x) зависит от параметра N (ширина окна). Этот параметр тесно связан с максимальным размером траектории паттерна ожидаемого движения и вычисляется в соответствии с отношением N = max(length(pi)), где pi = xp[j, k]), xp – участок траектории ожидаемого сигнала, принадлежащий к сегменту конечности и рассматриваемой плоскости; j, k – индексы, формирующие интервал на рассматриваемой траектории. Функция g(–x) представляет собой отраженную копию ожидаемого паттерна движения pi. Таким образом, операция свертки над траекториями, представленными в дискретной форме, имеет вид
где a(n) – исследуемая кинематическая траектория; b(n) – паттерн ожидаемого движения.
После выполнения описанных действий для каждого из паттернов ожидаемого движения из функций S формируются наборы Gconv и Bconv. Наборы сверточных функций передаются в модуль фильтрации (рис. 1). Принцип его работы основан на пороговом занулении отсчетов входных значений и их режекции. Расчет порогового значения фильтрации определяется выражением thresholdi = kpb_i, где k ∈ [0, 1]. В первом приближении коэффициент k был выбран при помощи введенной оценки thresholdeff оптимальности подавления ложных отметок на выборке с известным количеством и значением отметок расположения ожидаемого сигнала. Параметр оптимальности представлен выражением
На рисунке 4 показано, как меняется количество отметок ожидаемого сигнала при изменении коэффициента порогового фильтра k. В результате моделирования для паттернов движения (рис. 4) были рассчитаны коэффициенты k порогового фильтра наборов pb и pg. При выборе k допускается отклонение результирующего значения с учетом выполнения условия k ∈ [tholdeff_max – (0.1*tholdeff_max);tholdeff_max], (2) где tholdeff_max – значение параметра оптимальности подавления, максимально близкое к 1 (см. (1)).
При прохождении порогового фильтра в результирующей выборке могут присутствовать ложные отметки о потенциальном нахождении ожидаемого сигнала из-за того, что паттерны и исследуемый сигнал не оптимальны для операции свертки. Таким образом, наличие ярко выраженных по амплитуде выбросов рядом с отметкой максимума взаимнокорреляционной функции вполне ожидаемо. Помимо сигналоподобных всплесков, в выборке могут быть ложные отметки, полученные в результате наличия полезного сигнала, описывающего другой вид движения или случайное недетерминированное перемещение сегмента конечности. В силу этого применяется метод межсегментной оценки для режекции выборок пороговой фильтрации. Принцип его работы основан на представлении движения как детерминированного набора локомоций сегментов конечности. Набор локомоций представляет собой признак движения и образует тесную связь между разными наборами данных, принадлежащих к исследуемым сегментам конечности по принципу их взаимного расположения во времени. Таким образом, рассматривая циклическое движение как шаг, можно дать оценку бедренного и голенного сегментов конечности в сагиттальной и фронтальной плоскостях относительно сформированного признака. Исходя из этого следует, что отметка расположения ожидаемого паттерна в траектории сегмента бедра должна находиться в окрестности теоретической точки относительно выделенной отметки паттерна движения сегмента голени (рис. 5). Данное утверждение справедливо и для отметки в сегменте голени по отношению к сегменту бедра. Как видно из рисунка 5, в блоке режекции подавляется отметка теоретического расположения ожидаемого паттерна в траектории сегмента голени. Описанный в работе алгоритм блока выделения сигнала реализован в виде программного прототипа на языке С++ в составе имитационного комплекса исследовательской платформы ЭКЗ. Апробация представленного метода выделения проводилась на кинематических траекториях, зарегистрированных средствами исследовательской платформы ЭКЗ. В качестве исследуемого сигнала представлено циклическое движение – шаг. По результатам прохождения сигнала через блок выделения с описанными выше параметрами ожидается получение двух отметок потенциального расположения ожидаемого паттерна шага.
Заключение В результате проработки метода межсегментной оценки была построена модель выделения ожидаемого паттерна движения из регистрируемых кинематических траекторий, в рамках которой представлены способ описания движения при помощи кинематических траекторий, применяемый математический аппарат, краткое алгоритмическое описание предлагаемого метода. Модель реализована в виде программного прототипа с проведением его первичной апробации. Полученные результаты указывают на возможность применения метода межсегментной оценки для анализа кинематических траекторий средствами ЭКЗ в режиме реального времени, что допускает построение модели распознавания циклических движений оператора. Данная модель служит основой для построения и исследования возможных алгоритмов, решающих одну из задач предикции положения сегментов конечности оператора при взаимодействии с экзоскелетной системой. Литература 1. Бобе А.С., Конышев Д.В., Воротников С.А. Использование паттернов ЭМГ в задаче распознавания цикла ходьбы человека // Прикаспийский журнал: управление и высокие технологии. 2016. № 3. С. 21–28. DOI: 10.21672/2074-1707-2016-35-3-021-028 (in Engl.). 2. Давыдова Н.С., Васюк В.Е., Парамонова Н.А. Алгоритм анализа кинематических характеристик бега // Докл. БГУИР. 2020. Т. 18. № 8. С. 37–45. DOI: 10.35596/1729-7648-2020-18-8-37-45. 3. Воронцова О.И., Лозовская М.В. Структура шагового цикла по данным анализа кинетических и кинематических параметров походки человека // Вестн. новых медицинских технологий. 2017. № 3. С. 9–15. DOI: 10.12737/article_5975a4870397c0.15031094. URL: http://vnmt.ru/Bulletin/E2017-3/1-1.pdf (дата обращения: 10.05.2022). 4. Han Y., Liu C., Ya L., Ren L. Design of decision tree structure with improved BPNN nodes for high-accuracy locomotion mode recognition using a single IMU. Sensors, 2021, vol. 21, art. 526. DOI: 10.3390/ s21020526. 5. Wang M., Li Z., Lei Q., Wang Me., Zhang R. Research on gait recognition and prediction of exoskeleton robot based on improved DTW algorithm. J. of Physics Conf. Ser., 2020, vol. 1518, no. 1, pp. 012–019. DOI: 10.1088/1742-6596/1518/1/012019. 6. Zhu L., Wang Z., Ning Z., Zhang Y., Liu Y., Cao W. et al. A novel motion intention recognition approach for soft exoskeleton via IMU. Electronics, 2020, vol. 9, art. 2176. DOI: 10.3390/electronics9122176. 7. Feng Y., Chen W., Wang Q. A strain gauge based locomotion mode recognition method using convolutional neural network. Advanced Robotics, 2019, vol. 33, no. 5, pp. 1–10. DOI: 10.1080/01691864.2018. 1563500. 8. Иванова Г.Е., Скворцов Д.В. Объективный клинический анализ походки. Обзор // Вестн. восстановительной медицины. 2015. № 4. С. 59–66. 9. Скворцов Д.В. Диагностика двигательной патологии инструментальными методами: анализ походки, стабилометрия. М.: Т.М. Андреева, 2007. 640 c. 10. Gordleeva S.Y., Lukoyanov M.V., Mineev S.A. et al. Exoskeleton control system based on motor-imaginary brain-computer interface. Modern Technologies in Medicine, 2017, vol. 9, no. 3, pp. 31–38. DOI: 10.17691/stm2017.9.3.04. 11. Куркин С.А., Пицик Е.Н., Храмов А.Е. Использование искусственных нейронных сетей для классификации электрической активности головного мозга в процессе воображения движений у нетренированных испытуемых // Информационно-управляющие системы. 2019. № 6. С. 77–84. DOI: 10.31799/1684-8853-2019-6-77-84. 12. Лобов С.А., Миронов В.И., Кастальский И.А., Казанцев В.Б. Совместное использование командного и пропорционального управления внешними робототехническими устройствами на основе электромиографических сигналов // Современные технологии в медицине. 2015. Т. 7. № 4. С. 30–38. DOI: 10.17691/stm2015.7.4.04. 13. Будко Н.А., Медведев М.Ю., Будко А.Ю. Разработка и исследование метода векторного анализа ЭМГ предплечья для построения человеко-машинных интерфейсов // Изв. ЮФУ. Технические науки. 2021. № 2. С. 18–31. DOI: 10.18522/2311-3103-2021-2-18-31. 14. Провоторов Н.В., Таратонов И.А. Алгоритмы управления экзоскелетной системой нижних конечностей человека // Системный анализ в медицине: матер. XII Междунар. научн. конф. 2018. С. 68–72. References
|





 где Kt – количество теоретических отметок расположения сигнала; Kr – количество полученных отметок после прохождения пороговой фильтрации.
где Kt – количество теоретических отметок расположения сигнала; Kr – количество полученных отметок после прохождения пороговой фильтрации.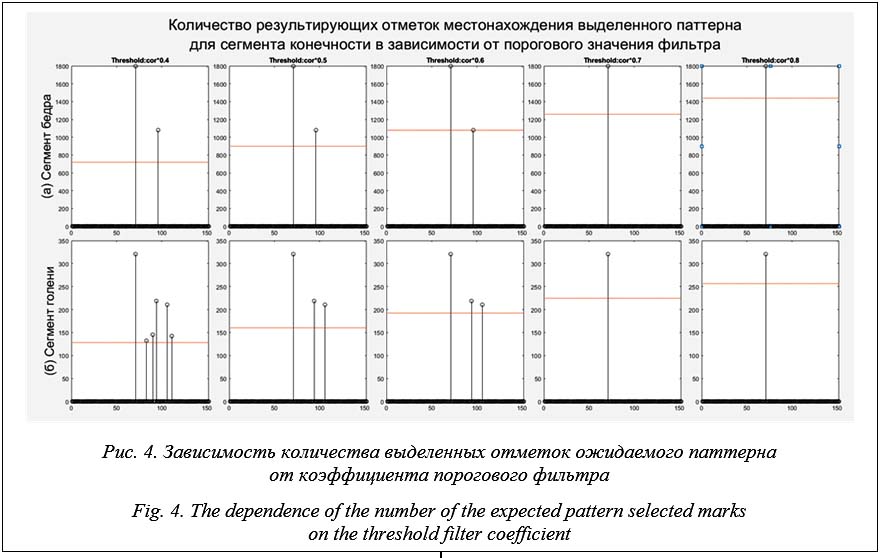


| Permanent link: http://swsys.ru/index.php?id=4932&lang=en&page=article |
Print version |
| The article was published in issue no. № 3, 2022 [ pp. 493-501 ] |
Back to the list of articles