Journal influence
Bookmark
Next issue
Simulation of hydraulic actuator dynamics in virtual environment systems
Abstract:The development of computer graphics and computing machinery has led to active using of virtual environment systems in many areas of human activity. In particular, virtual (computer) training complexes for simulation and control of complex mechanical systems are widely used. Some of these systems are equipped with hydraulic actuators. This paper considers real-time simulation of hydraulic actuators dynamics in virtual environment systems. The authors propose solving this problem based on an approach with co-simulation dynamics of hydraulic actuators and articulated rigid bodies. To this end, the authors used a sequential impulses method that resulted in obtaining coordinates and velocities of piston and two linked bodies. The approach assumes that, first, piston velocity is computed by integrating hydraulic equations using a semi-implicit Euler scheme without taking load into account. Then, the obtained velocity is adjusted by an impulse that limits velocities of a piston and two linked bodies. The proposed approach is iterative and makes it possible to implement dynamics of articulated body systems with a hydraulic actuator in real time. The main result of the study is in flexibility of the developed approach for simulating hydraulic actuator dynamics based on a sequential impulses method; it allows ensuring all constraints in a multibody system in a unified way. Unlike other similar solutions, this approach does not require cumbersome matrix calculations and solving large dimension linear equation systems. Approbation in the created VirSim software package showed adequacy and effectiveness of the solutions proposed in the paper. The practical significance of the work is that the proposed methods and approaches for simulating hydraulic actuators dynamics can be used in simulators for training operators of skills for controlling robots, machines of various types, mechanisms, equipment, etc.
Аннотация:Системы виртуального окружения активно применяются во многих областях деятельности человека. В частности, широкое распространение получили виртуальные (компьютерные) тренажеры для моделирования и управления сложными механическими системами. Некоторые из таких систем оснащены гидроприводами в качестве исполнительных устройств. В данной работе рассматривается задача моделирования динамики гидроприводов в системах виртуального окружения в масштабе реального времени. Предлагаемое решение этой задачи базируется на подходе, когда осуществляется совместное моделирование динамики гидропривода и системы шарнирно связанных тел. Для этого задействован метод последовательных импульсов, в рамках которого получены ограничения относительно координат и скоростей поршня и двух связанных тел. Идея такого подхода состоит в том, что сначала путем интегрирования уравнений гидравлики с помощью полунеявной схемы Эйлера вычисляется скорость движения поршня без учета нагрузки, а затем эта скорость корректируется с помощью импульса, который обеспечивает ограничения скоростей поршня и двух связанных тел. Предлагаемый подход является итерационным и позволяет реализовать динамику систем шарнирно связанных тел с гидроприводом в масштабе реального времени. Основной результат заключается в том, что разработанный подход является универсальным и позволяет обрабатывать все ограничения в системе тел единым образом. В отличие от других аналогичных методов он не требует громоздких матричных вычислений и решения систем линейных уравнений большой размерности. Апробация в созданном программном комплексе VirSim показала адекватность и эффективность предложенных решений. Практическая значимость работы заключается в том, что предложенные методы и подходы для моделирования динамики гидроприводов могут быть использованы при реализации тренажеров, предназначенных для обучения операторов навыкам управления роботами, машинами различного типа, механизмами, техникой и т.д.
| Authors: Strashnov, E.V. (strashnov_evg@mail.ru) - Federal State Institution "Scientific Research Institute for System Analysis of the Russian Academy of Sciences" (SRISA RAS) (Research Associate), Moscow, Russia, Mironenko, I.N. (vstudio@niisi.ras.ru) - Federal State Institution "Scientific Research Institute for System Analysis of the Russian Academy of Sciences" (SRISA RAS) (Research Associate), Moscow, Russia | |
| Keywords: virtual environment systems, semi-implicit Euler scheme, sequential impulses method, directional control valve, hydraulic actuator, dynamics modeling |
|
| Page views: 1087 |
PDF version article |
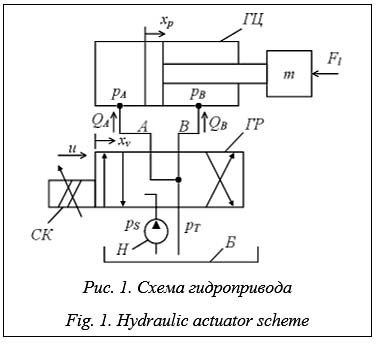
Введение. Гидравлический привод (гидропривод) представляет собой совокупность устройств для приведения в движение рабочих органов машин и механизмов посредством энергии жидкости. В настоящей работе рассматриваются гидроприводы поступательного движения (гидроцилиндры), состоящие из емкости, внутри которой находится поршень со штоком. Гидроцилиндры используются в строительно-дорожных, землеройных, подъемно-транспортных машинах, авиации, робототехнике и т.д. Развитие электроники обусловило появление бульдозеров, экскаваторов, ковшовых погрузчиков, кранов и проч., снабженных управлением по принципу джойстика. Это повлекло за собой некоторые проблемы, одна из них – обучение операторов навыкам управления такими машинами. Использование реальных машин для обучения операторов сопряжено с материальными затратами и может привести к поломке дорогостоящего оборудования. Аль- тернативное решение проблемы заключается в применении систем виртуального окружения. Такой подход подразумевает замену реальных объектов на их виртуальные аналоги с реализацией моделирования этих объектов в виртуальной среде. Для этого активно создаются компьютерные тренажеры и симуляторы [1], на которых обучение операторов осуществляется с помощью органов управления, аналогичных органам управления реальных машин. При этом качество обучения непосредственно зависит от адекватности моделирования динамики виртуальных объектов. В процессе обучения у операторов не должны возникнуть ложные навыки управления рабочими органами машин, которые содержат гидроприводы. Кроме того, системы виртуального окружения накладывают ограничения, в рамках которых все расчеты должны проводиться в масштабе реального времени. Поэтому разработка эффективных методов и алгоритмов моделирования динамики гидроприводов в системах виртуального окружения является важной и актуальной задачей. Среди существующих решений для моде- лирования динамики гидроприводов условно можно выделить два подхода. Первый подход [2, 3] подразумевает разработку сложной математической модели гидропривода без учета динамики всей механической системы. Динамические процессы в гидросистеме описываются системой нелинейных дифференциальных уравнений, которые формируются в зависимости от ее структуры. Распространенным решением в рамках данного подхода явля- ется использование библиотеки гидравлики Simscape SimHydraulics (https://www.mathworks. com/products/simscape-fluids.html) среды Simulink, предназначенной для моделирования и симуляции гидравлических систем. В работах [4–6] из блоков данной библиотеки построены модели, позволяющие осуществлять имитационное моделирование гидроприводов различной сложности. Второй подход предполагает совместное моделирование гидропривода с динамикой системы многих тел [7–10]. Идея такого подхода заключается в том, что на каждом шаге моделирования динамика систем многих тел сводится к дифференциально-алгебраическим уравнениям большой размерности. Один из методов решения этих уравнений базируется на итерационном алгоритме с применением множителей Лагранжа. Недостаток этого подхода состоит в том, что из-за большого числа матричных вычислений и необходимости решения систем линейных уравнений обеспечение реального времени моделирования динамики систем тел становится затруднительным. В настоящей работе для реализации динамики гидропривода предлагается подход, основанный на итерационном методе последовательных импульсов. Его основная идея заключается в том, что вводится специальное ограничение, связывающее координаты поршня и двух тел механической системы, относительным движением которых управляет гидропривод. В рамках такого подхода на каждом шаге модели- рования сначала реализуется динамика гидропривода без нагрузки, а потом эта нагрузка учитывается при обеспечении введенного ограничения. Апробация предлагаемых в статье решений была проведена в разработанном в НИИСИ РАН программном комплексе виртуального окружения VirSim [11] на примере моделирования динамики роботов, которые содержат гидроприводы. Математическая модель гидропривода
Согласно второму закону Ньютона, уравнение движения поршня будет иметь вид
где vp – скорость движения поршня; SA и SB – площади поршневой и штоковой полостей гид- роцилиндра; k – коэффициент вязкого трения; Ff – сила сухого трения, модуль которой не превышает Ff max. Изменение давления в полостях гидроцилиндра подчиняется уравнениям баланса расхода жидкости:
где β – модуль объемной упругости жидкости; VA и VB – начальные объемы полостей гидроцилиндра. При смещении золотника относительно нейтрального положения изменяются площади отверстий, через которые жидкость поступает в полости гидроцилиндра. Расход жидкости через отверстие определяется известным из гидравлики соотношением [12]:
где В данной статье рассматривается модель золотника с отрицательным перекрытием на слив в нейтральном положении. Также задано положительное перекрытие для подачи жидкости от насоса. Пусть положение золотника является нормализованным (–1 ≤ xv ≤ 1). Тогда перекрытия определяются с помощью следующих функций:
в которых с1 и c2 – величины положительного и отрицательного перекрытий соответственно. Расходы жидкости QA и QB через отверстия золотника будут вычисляться как
Если пренебречь гистерезисом и чувствительностью срабатывания клапана гидравлического распределителя, то его динамику можно описать с помощью дифференциального уравнения второго порядка:
где Kv – коэффициент усиления электрического сигнала клапана; ωv – собственная частота; Dv – коэффициент демпфирования [2]. Дифференциальные уравнения (1)–(5) описывают математическую модель динамики гидропривода. Предлагаемое решение для моделирования динамики гидропривода заключается в том, что сначала вычисляется скорость поршня vp без учета внешней силы Fl и силы сухого трения Ff, а затем полученная скорость корректируется на основе динамики всей системы тел. Динамика шарнирно связанных тел Гидроприводы применяются для управления механическими устройствами, которые представляют собой систему шарнирно связанных тел. Для моделирования динамики таких систем ранее был разработан итерационный метод последовательных импульсов [13, 14], который обеспечивает выполнение ограничений различного типа, накладываемых на координаты и скорости тел. Примером служат голономные ограничения шарниров, контакта, удара и трения тел, которые задаются в виде равенств и неравенств. Рассмотрим ограничение специального типа для реализации динамики гидропривода.
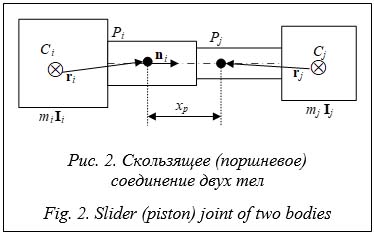
Для учета динамики гидропривода рассмотрим ограничение
Продифференцируем его по времени:
где vi и vj – линейные скорости двух тел; ωi и ωj – угловые скорости двух тел; ri = CiPi, rj = CjPj. Так как векторы PiPj и ni параллельны, применяя формулу Бура [15]
Тогда (7) преобразуется к виду
где ti = ri ´ ni, tj = rj ´ ni. Задача заключается в том, чтобы обеспечить ограничения вида (8). Для ее решения воспользуемся методом последовательных импуль- сов. Сформируем импульс pn = pni, при применении которого скорости тел и поршня будут изменяться следующим образом:
где m – приведенная масса поршня; mi и mj – массы тел; Ii и Ij – тензоры инерции тел. Подставим полученные скорости в уравнение (8). Тогда после преобразований имеем уравнение
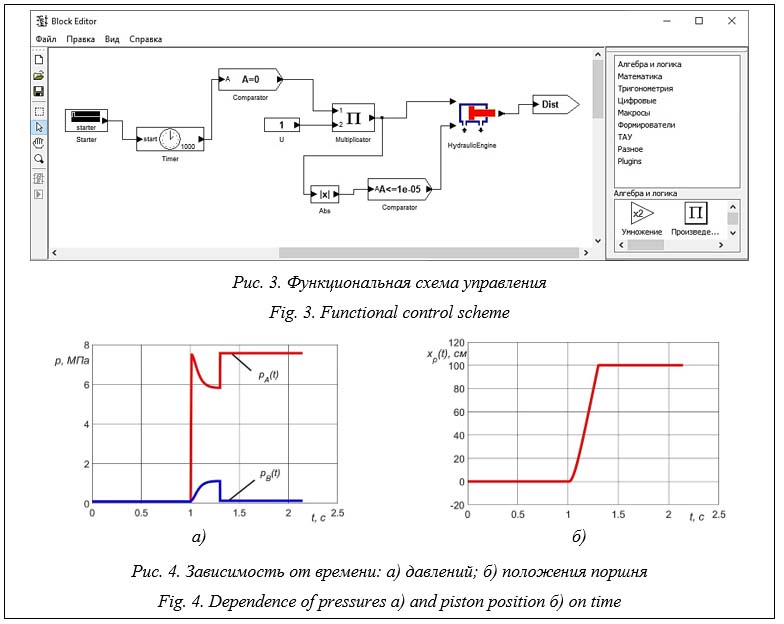
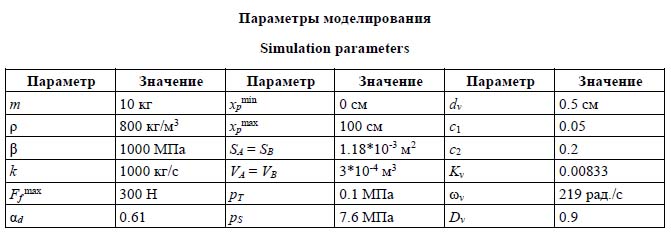
Решая его, найдем импульс p, применение которого позволит выполнить ограничение вида (8). Однако в методе последовательных импульсов также требуется обеспечить выполнение остальных ограничений. Поэтому ограничение (8) будет выполнено только с заданной точностью после проведения нескольких итераций. Сходимость метода последовательных импульсов обусловлена его эквивалентностью сходящемуся методу Гаусса–Зейделя для численного решения системы линейных уравнений, которая образуется при одновременном учете всех ограничений системы тел. В процессе моделирования также будут нарушаться ограничения (6). Для обеспечения их выполнения применяется стабилизация на основе ранее разработанного авторами метода раздельных импульсов. Результаты моделирования Предложенные в статье методы и подходы для моделирования динамики гидроприводов были реализованы в системе виртуального окружения VirSim [11], разработанной в НИИСИ РАН. Программный комплекс написан на языке C++ с использованием графической библиотеки OpenGL и программно-аппаратной архитектуры CUDA, в него входят подсистемы управления, динамики и визуализации. В рассматриваемом комплексе логика управления виртуальными объектами задается с помощью функциональных схем, которые состоят из набора связанных друг с другом блоков. Согласно созданной функциональной схеме, подсистема управления осуществляет расчет уп- равляющих сигналов, подаваемых на исполнительные устройства виртуальных объектов. Подсистема динамики обрабатывает эти сигналы и вычисляет новые координаты (положения и ориентации) объектов на основе математических моделей, описывающих их движение. Полученные координаты передаются в подсистему визуализации, которая выполняет рендеринг изображений виртуальной сцены. Масштаб реального времени достигается за счет использования аппаратно-программных средств для параллельных вычислений на GPU, включая шейдеры (вершинный, тесселяционный, геометрический и фрагментный). Математическая модель гидропривода (1)–(5) и обработка ограничений вида (6) и (8) методом последовательных импульсов реализованы в виде программных модулей подсистемы динамики программного комплекса VirSim. Для интегрирования уравнений гидравлики (1), (2) и (5) была задействована полунеявная схема Эйлера. Так как модуль объемной упругости β является достаточно большим, уравнения (2) образуют жесткую систему дифференциальных уравнений. По этой причине интегрирование уравнений гидравлики реализовано с уменьшенным фиксированным шагом Δt1 = 0.1 мс, в то время как интегрирование уравнений движения тел осуществлялось с переменным шагом Δt (от 1 до 10 мс), что необходимо для обеспечения реального времени моделирования. Согласно полунеявной схеме Эйлера, интегрирование уравнений (1), (2) и (5) выполняется следующим образом:
где QA(t+Δt1) и QB(t+Δt1) вычисляются по формулам (3) и (4) соответственно. В рассматриваемой схеме интегрирования на каждом шаге моделирования по входному сигналу u(t) сначала вычисляется новое положение xv(t+Δt1) клапана гидрораспределителя, затем давления pA(t+Δt1) и pB(t+Δt1), а в конце скорость движения поршня vp(t+Δt1). Интегрирование продолжается до тех пор, пока не будут получены значения скоростей поршня для момента времени t+Δt. Эти скорости затем ис- пользуются при обработке ограничений (6) и (8) с итерационным вычислением импульса p по формуле (9), а также для учета сухого трения и ограничений на относительное движение поршня. В качестве критерия окончания итераций было использовано условие |p| ≤ ε, где ε – заданное число.
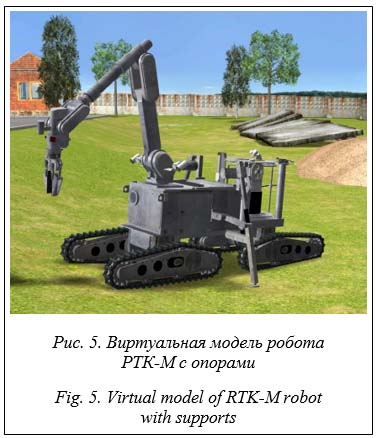
Предложенные в статье решения также были реализованы для моделирования динамики роботов, которые содержат гидроприводы. Примером служит виртуальная модель робота РТК-М (рис. 5) на шасси с четырьмя гусеницами. Этот робот оснащен манипулятором, кабелеукладчиком и опорами, управление которыми осуществляется с помощью гидроприводов. Основное предназначение робота – это выполнение аварийных демонтажных работ, во время которых опоры увеличивают устойчивость робота, не позволяя ему опрокинуться. Заключение
Апробация в программном комплексе системы виртуального окружения показала применимость разработанных методов и подходов для управления роботами, содержащими гидроприводы. Полученные результаты могут быть использованы при создании тренажеров, предназначенных для обучения операторов навыкам управления машинами различного типа, такими как краны, экскаваторы, бульдозеры, погрузчики и проч. В перспективе разработанные методы и подходы могут быть применены для моделирования гидроприводов вращательного типа (гидромоторы и поворотные гидродвигатели), а также более сложных гидравлических систем. Кроме того, одним из возможных направлений исследований может быть реализация математической модели насоса с регулятором давления. Список литературы 1. Ляшенко Ю.М., Ляшенко А.Ю., Ревякина Е.А. Применение компьютерных тренажеров в образовательном процессе машинистов одноковшовых экскаваторов как инструмент повышения уровня показателей функционального статуса // Современные прикладные исследования: мат. науч.-практич. конф. 2021. Т. 1. С. 236–242. 2. Wang W., Zhao J. Energy-efficient robust control for direct drive and energy recuperation hydraulic servo system. Complexity, 2020, pp. 1–19. doi: 10.1155/2020/6959273. 3. Жданов А.В. Математическая модель позиционного гидропривода // Вестн. СибАДИ. 2016. № 3(49). С. 87–93. 4. Михеева Н.И. Имитационное моделирование гидропривода в нелинейном приближении // Вестн. КРСУ. 2017. Т. 17. № 5. С. 83–86. 5. Debeleac C. Dynamic modeling and simulation of working regime of the hydraulic driven of auger bucket for loader using Matlab/SimHydraulics. Hidraulica, 2021, no. 4, pp. 7–16. 6. Полтева Е.А., Иванов Д.В., Сандлер И.Л., Антонова В.В. Моделирование информационно-измерительной системы гидравлического привода промышленного робота модели «Универсал 15» // Вестн. СамГУПС. 2020. № 2. С. 74–82. 7. Rahikainen J., Kiani-Oshtorjani M., Sopanen J., Jalali P., Mikkola A. Computationally efficient approach for simulation of multibody and hydraulic dynamics. Mechanism and Machine Theory, 2018, vol. 130, pp. 435–446. doi: 10.1016/j.mechmachtheory.2018.08.023. 8. Mitrev R., Janosevic D., Marinkovic D. Dynamical modelling of hydraulic excavator considered as a multibody system. Tech. Gazette, 2017, vol. 24, no. 2, pp. 327–338. doi: 10.17559/TV-20151215150306. 9. Rahikainen J., Gonzalez F., Naya M.A., Sopanen J., Mikkola A. On the cosimulation of multibody systems and hydraulic dynamics. Multibody System Dynamics, 2020, vol. 50, no. 2, pp. 143–167. doi: 10.1007/s11044-020-09727-z. 10. Kurinov I., Orzechowski G., Hamalainen P., Mikkola A. Automated excavator based on reinforcement learning and multibody system dynamics. IEEE Access, 2020, vol. 8, pp. 213998–214006. doi: 10.1109/ACCESS.2020.3040246. 11. Михайлюк М.В., Мальцев А.В., Тимохин П.Ю., Страшнов Е.В., Крючков Б.И., Усов В.М. Система виртуального окружения VirSim для имитационно-тренажерных комплексов подготовки космонавтов // Пилотируемые полеты в космос. 2020. № 4. С. 72–95. doi: 10.34131/MSF.20.4.72-95. 12. Manring N., Fales R. Hydraulic Control Systems. USA, NY, JohnWiley Publ., 2019, 389 p. doi: 10.1002/9781119418528. 13. Михайлюк М.В., Страшнов Е.В. Моделирование динамики системы связанных тел с учетом трения в шарнирах // Наука и Образование. МГТУ им. Н.Э. Баумана. 2016. № 1. С. 108–124. doi: 10.7463/0116.0830582. 14. Страшнов Е.В., Омельченко Д.В. Моделирование динамики антропоморфных шагающих роботов в системах виртуального окружения // INJOIT. 2020. Т. 8. № 10. С. 66–72. 15. Дронг В.И., Дубинин В.В., Ильин М.М. и др. Курс теоретической механики. М.: Изд-во МГТУ им. Н.Э. Баумана, 2017. 580 с. References 1. Lyashenko, Yu.M., Lyashenko, A.Yu., Revyakina, E.A. (2021) ‘The use of computer simulators in the educational process of single-bucket excavator drivers as a tool for improving the level of functional status indicators’, Proc. Sci.-Pract. Conf. Modern Applied Research, 1, pp. 236–242 (in Russ.). 2. Wang, W., Zhao, J. (2020) ‘Energy-efficient robust control for direct drive and energy recuperation hydraulic servo system’, Complexity, pp. 1–19. doi: 10.1155/2020/6959273. 3. Zhdanov, A.V. (2016) ‘Mathematical model of position hydraulic drive’, The Russian Automobile and Highway Industry J., 3(49), pp. 87–93 (in Russ.). 4. Miheeva, N.I. (2017) ‘Simulation modelling of the hydraulic drive in the nonlinear approximation’, Herald of KRSU, 17(5), pp. 83–86 (in Russ.). 5. Debeleac, C. (2021) ‘Dynamic modeling and simulation of working regime of the hydraulic driven of auger bucket for loader using Matlab/SimHydraulics’, Hidraulica, (4), pp. 7–16. 6. Polteva, E.A., Ivanov, D.V., Sandler, I.L., Antonova, V.V. (2020) ‘Modeling of the hydraulic drive of the industrial robot of the “UNIVERSAL 15” model’, Vestn. SamGUPS, (2), pp. 74–82 (in Russ.). 7. Rahikainen, J., Kiani-Oshtorjani, M., Sopanen, J., Jalali, P., Mikkola, A. (2018) ‘Computationally efficient approach for simulation of multibody and hydraulic dynamics’, Mechanism and Machine Theory, 130, pp. 435–446. 8. Mitrev, R., Janosevic, D., Marinkovic, D. (2017) ‘Dynamical modelling of hydraulic excavator considered as a multibody system’, Tech. Gazette, 24(2), pp. 327–338. doi: 10.17559/TV-20151215150306. 9. Rahikainen, J., Gonzalez, F., Naya, M.A., Sopanen, J., Mikkola, A. (2020) ‘On the cosimulation of multibody systems and hydraulic dynamics’, Multibody System Dynamics, 50(2), pp. 143-167. doi: 10.1007/s11044-020-09727-z. 10. Kurinov, I., Orzechowski, G., Hamalainen, P., Mikkola, A. (2020) ‘Automated excavator based on reinforcement learning and multibody system dynamics’, IEEE Access, 8, pp. 213998–214006. doi: 10.1109/ACCESS.2020.3040246. 11. Mikhailyuk, M.V., Maltsev, A.V., Timokhin, P.Yu., Strashnov, E.V., Kryuchkov, B.I., Usov, V.M. (2020) ‘The VirSim virtual environment system for the simulation complexes of cosmonaut training’, Manned Spaceflight, (4), 12. Manring, N., Fales, R. (2019) Hydraulic Control Systems. USA, NY, JohnWiley Publ., 389 p. doi: 10.1002/9781119418528. 13. Michaylyuk, M.V., Strashnov, E.V. (2016) ‘Simulating dynamics of the system of articulated rigid bodies with joint friction’, Sci. and Education of the Bauman MSTU, 1, pp. 108–124 (in Russ.). doi: 10.7463/0116.0830582. 14. Strashnov, Е.V., Omelchenko, D.V. (2020) ‘Simulation of anthropomorphic walking robot dynamics in virtual environment systems’, INJOIT, 8(10), pp. 66–72 (in Russ.). 15. Drong, V.I., Dubinin, V.V., Il'in, M.M. et al. (2017) Theoretical Mechanics Course. Moscow, 580 p. (in Russ.). |
 (2)
(2)
 (3)
(3) (4)
(4)
 (7)
(7)
| Permanent link: http://swsys.ru/index.php?page=article&id=5036&lang=en |
Print version |
| The article was published in issue no. № 4, 2023 [ pp. 582-589 ] |
Perhaps, you might be interested in the following articles of similar topics: