Journal influence
Bookmark
Next issue
Planning and computer simulation of an experiment to simulate the goal presence for a radar station
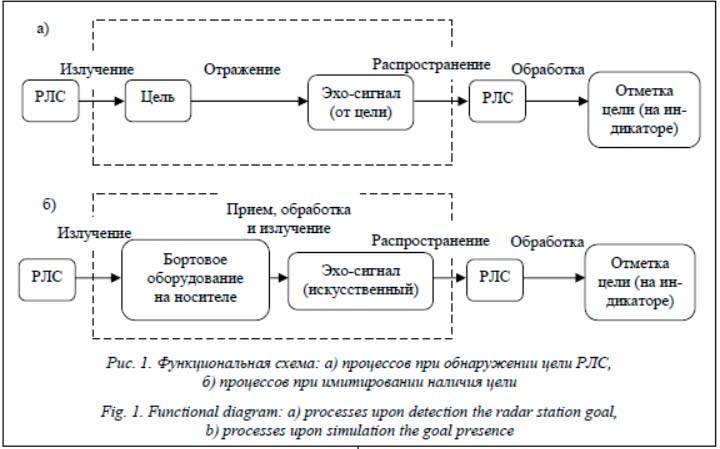
Abstract:The paper examines the issue of measuring the tactical characteristics of radar stations (radar), such as, for example: detection range, the number of goal coordinates and the accuracy of their determination, resolution for each coordinate, visibility zone, and others. At the moment, the tactical characteristics are determined based on technical characteristics and using a full-scale experiment, involving aircraft, laboratory aircraft, and other objects. The complexity of a natural experiment in its organization and a few goal objects, it is also costly in terms of resources (monetary, administrative, labor, time). It is proposed to collect initial data (coordinates and the number of localized targets by the radar station, coordinates and the number of simulated targets by the onboard equipment of the carrier) and further analysis (statistical processing of data from the station and onboard equipment of the carrier) to simulate the goal presence for the radar station equipment by emitting an echo signal targets at the giv-en coordinates. The echo signal is synthesized by the equipment (generator and onboard computer) lo-cated onboard the carrier (unmanned aerial vehicle). The carrier positions the onboard equipment in angular coordinates (azimuth and elevation) corresponding to the angular coordinates of the simulated target, but at a much smaller distance. The range (distance between the goal and the radar) of the simu-lated target is controlled by the onboard equipment by changing the parameters of the generated echo signal (the delay time of the emitted pulses relative to the emitted pulses by the radar equipment) cor-responding to the simulated target. The advantage of the proposed method is the expended net resource (time, labor, money) and the ability to control the number of simulated targets by changing the structure of the echo signal.
Аннотация:В статье изучается вопрос измерения тактических характеристик радиолокационных станций, например, таких как дальность обнаружения, количество координат цели и точность их определения, разрешающая способность по каждой координате, зона видимости и другие. На данный момент тактические характеристики определяются на основе технических характеристик и с применением натурного эксперимента, с привлечением самолетов, самолетов-лабораторий и других объектов. Сложность натурного эксперимента в его организации и ограниченном количестве объектов целей, к тому же он затратный по ресурсам (денежным, административным, трудовым, временным). Предлагается для сбора исходных данных (координаты и количество обнаруженных целей средствами радиолокационной станции, координаты и количество имитируемых целей бортовым оборудованием носителя) и дальнейшего анализа (статистическая обработка данных от станции и бортового оборудования носителя) имитировать наличие цели для оборудования радиолокационной станции путем излучения эхо-сигнала цели на заданных координатах. Эхо-сигнал синтезируется оборудованием (генератором и бортовой ЭВМ), располагающимся на борту носителя (бес-пилотного летательного аппарата). Носитель позиционирует бортовое оборудование на угловых координатах (азимут и угол места), соответствующих угловым координатам имитируемой цели, но на значительно меньшем удалении. Дальность (расстояние между целью и радиолокационной станцией) имитируемой цели контролируется бортовым оборудованием путем изменения пара-метров генерируемого эхо-сигнала (время задержки излученных импульсов относительно излученных импульсов оборудованием радиолокационной станции), соответствующего имитируемой цели. Преимуществами предлагаемого метода являются сокращение затрачиваемых ресурсов и возможность контроля количества имитируемых целей путем изменения структуры эхо-сигнала.
| Authors: Kalabin, A.L. (alex.ka.86@gmail.com) - Tver State Technical University, Tver , Russia, Ph.D, A.K. Morozov (yerdnavozorom@gmail.com) - Tver State Technical University (Postgraduate Student), Tver , Russia | |
| Keywords: imitation of a radar target, computer modeling, unmanned aerial vehicle, qtcreator, C++ |
|
| Page views: 2789 |
PDF version article |
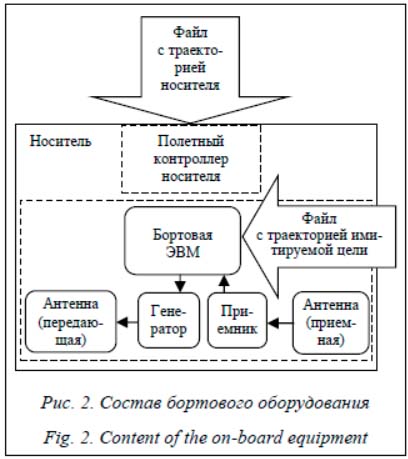
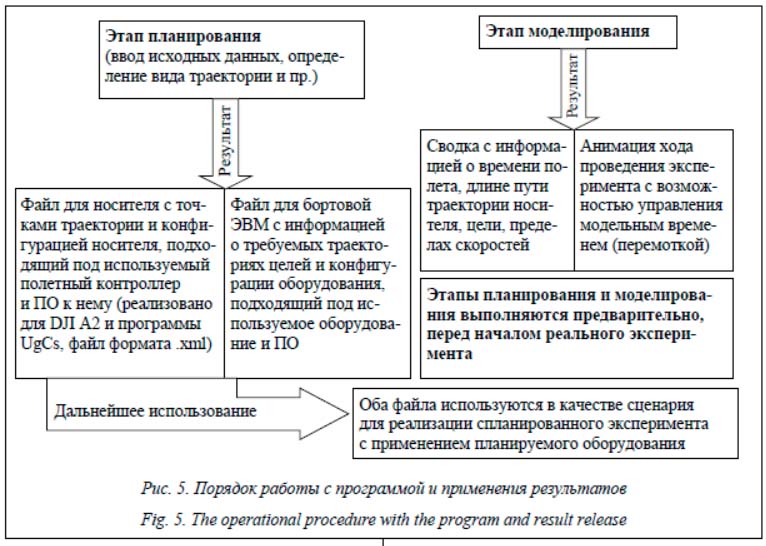
Роль носителя заключается в перемещении бортового оборудования на заданные угловые координаты, но на значительно меньшее удаление, чем имитируемой цели (~ 0,5–5 км). Таким образом, угловые координаты цели контролируются положением носителя, а дальность – параметрами эхо-сигнала, генерируемого бортовым оборудованием. Требуемая траектория носителя загружается в его полетный контроллер (устройство автопилотирования, на рынке присутствуют полетные контроллеры различных производителей: DJI, ArduPilot и др.), который обеспечи-вает движение по загруженной траектории без участия пилота. В данной работе предполагается, что для носителя используется полетный контроллер фирмы DJI (полетный контроллер определяет структуру и тип файла с информацией о траектории для носителя). Траектория цели загружается в бортовую ЭВМ, которая в процессе полета, используя текущие координаты носителя и требуемые координаты цели, вычисляет параметры эхо-сигнала и переконфигурирует генератор. Роль бортовой ЭВМ может выполнять одноплатный компьютер либо микроконтроллер с необходимой периферией и прочим (под периферией понимаются gps-датчик, датчик высоты и другие необходимые датчики как источник информации о положении носителя). Для требуемого результата работы такого устройства необходимо написать программу (алгоритм), способную обеспечить траекторию цели, как описано выше. Алгоритм работы для конкретной реализации бортовой ЭВМ в данной работе не рассматривается, предполагается, что уже есть какая-то реализация, которую можно использовать. Экспериментальные исследования широко применяются на всех стадиях разработки, производства и эксплуатации различных технических объектов, в частности, средств ав-томатики и информационно-измерительной техники. При создании электронных и электро-технических устройств основные затраты приходятся на их настройку и испытания. Рабочие процессы устройств автоматики протекают в изменяющихся условиях, следовательно, зависят от большого числа переменных. Описание таких процессов аналитическими методами не всегда возможно, поэтому при их исследовании необходимо применять методы планирования эксперимента, которые позволяют одновременно варьировать все влияющие факторы. По экспериментальным данным формируется математическая модель исследуемого объекта. Математическое описание устройств и процессов позволяет исследовать и оптимизировать их параметры [3]. Программная реализация В данной работе под планированием понимается уточнение условий проведения эксперимента (координаты расположения РЛС, ширина луча, направление по азимуту, углу места, пределы скоростей для носителя и пр.). Результатом планирования будут считаться сгенерированные файлы для полетного контроллера и бортовой ЭВМ, содержащие информацию о траектории носителя и целей. Поэтому для реализации эксперимента, представленного на рисунке 1б, была написана программа планирования и компьютерного моделирования его основных составляющих. Программы выполнена на языке С++, визуализация процесса компьютерного моделирования осуществлена с применением графической библиотеки OpenGL. Среда разработки – QtCreator. При проектировании приложения также использовалась архитектура MVC (модель–представление–контроллер). Это подразумевает, что вся логика вычислений содержится в группе классов блока «модель», элементы интерфейса – в блоке «представление», описание реакций на действия пользователя – в блоке «контроллер». Благодаря такому логическому разграничению классов программы существенно облегчается процесс отладки кода при разработке приложения.
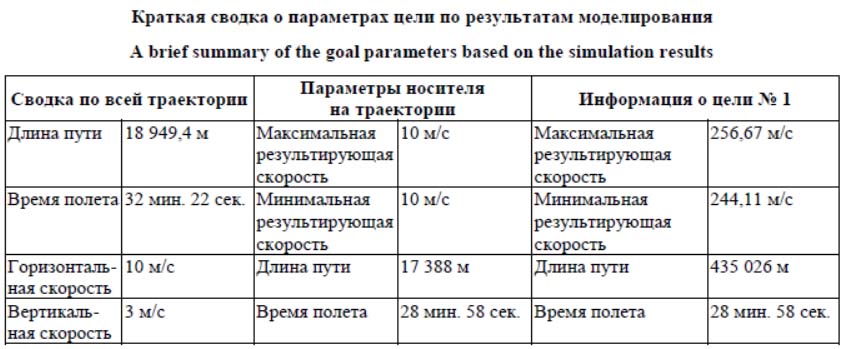
Основные задачи, решаемые программой: планирование эксперимента с целью уточнения плана его проведения, компьютерное моделирование эксперимента для качественного анализа хода его проведения, генерирование плана проведения эксперимента, включающего в себя полетное задание для беспилотного летательного аппарата, загружаемое в полетный контроллер, и сценарий для бортового оборудования, загружаемый в бортовую ЭВМ. Рассмотрим подробнее структурную схему объектов-моделей программы, представленную на рисунке 4. Модель РЛС включает поворотное устройство для ориентирования луча на требуемых угловых координатах, излучатель для моделирования уровня мощности сигнала станции, приемник для моделирования процесса приема сигнала через антенну, антенну для ограничения области пространства, в пределах которой ведутся прием и излучение сигнала, индикатор для отображения отметок целей. Под отметкой цели понимается результат обнаружения по информации, содержащейся в эхо-сигнале от носителя как реальной цели и от эхо-сигнала, синтезированного бортовым оборудованием. Модель носителя включает в себя основные параметры носителя и алгоритм движения носителя по траектории. Модель траектории носителя – алгоритм генерирования траектории носителя по требуемой траектории цели. Модель траектории цели – алгоритм генерирования различных типов траектории (вертикальная, горизонтальная, спиральная и т.д.). Модель бортовой ЭВМ – алгоритм генерирования дальности цели по заданной траектории носителя и требуемой траектории имитируемой цели. Модель земной поверхности служит для отображения карты и привязки планируемого эксперимента к конкретной местности. Результатом работы программы является отчет (сводка), включающий суммарное время проведения работ, требуемые параметры носителя и генератора для проведения планируемых работ, длину траектории носителя, время имитирования наличия целей, длину траектории целей, скоростные характеристики целей на траектории (рис. 5).
Модели всех объектов составляют модель, соответствующую планируемому эксперименту. Каждая из моделей воспроизводит не точное поведение моделируемого объекта, а лишь его основные черты (с точки зрения программной реализации), поэтому их програм-мное представление упрощено по сравнению с реальным поведением. Разберем подробнее каждый из элементов модели. Модель поворотного устройства. Под поворотным устройством в программе понимается алгоритм позиционирования луча. В программе реализованы следующие типы: – круговой обзор [4] a0 = aн; φ0 = φн; ak+1(dt) = ak + 2π/Tdt; φk+1(dt) = const = φн, где a0, ak, ak+1 – азимут на 0-м, k-м, k+1-м ша-гах моделирования; φ0, φk, φk+1 – угол места на 0-м, k-м, k+1-м шагах моделирования; dt – сдвиг модельного времени; T – период оборота станции по азимуту; aн – начальный азимут; φн – начальный угол места; – фиксированное положение: ak+1(dt) = a0 = = aн = const; φk+1(dt) = φ0 = φн = const.
Каждая из траекторий также дискретизируется указанным количеством точек, так как для устройства автопилотирования задаются не тип и конфигурация траектории, а точки, из которых она состоит. Для каждого полетного контроллера есть свои ограничения по количеству точек. Например, для полетного контроллера компании DJI от 16 до 300 в зависимости от марки, для ArduPilot – до 30 000. Модель траектории носителя. Точки траектории носителя генерируются на основе требуемой траектории цели следующим образом:
где pц i – i-я точка траектории с требуемыми координатами цели; pрлс – точка с координатами РЛС; pнi – i-я точка траектории с требуемыми координатами носителя; rн min – минимальное расстояние между носителем и точкой стояния РЛС. Представленная формула позволяет вычислить координаты точек траектории носителя, находящихся на том же радиус-векторе, что и На основе траектории цели (спираль) генерируется траектория носителя (полусфера) (см. пример http://www.swsys.ru/uploaded/image/2021-2/2021-2-dop/14.jpg). Величина rн min выбирается исходя из параметров РЛС, носителя и бортового оборудования [6]. Модель сценария работы бортовой ЭВМ. Задача бортового оборудования (генератора + ЭВМ) – вычисление параметров эхо-сигнала для имитируемой цели, зависящих от положения носителя и требуемого положения цели [7]. Основным параметром является время задержки импульса, сгенерированного бортовым оборудованием, относительно излученного оборудованием РЛС:
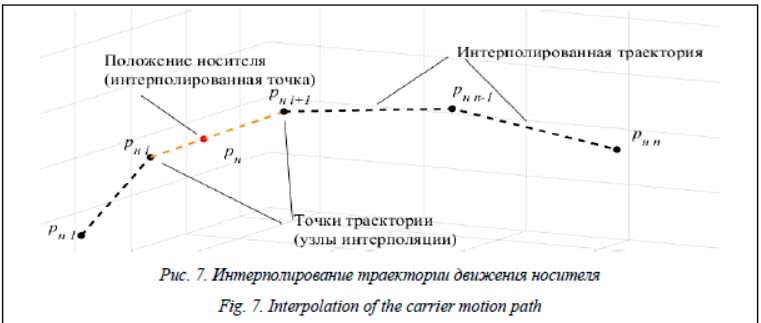
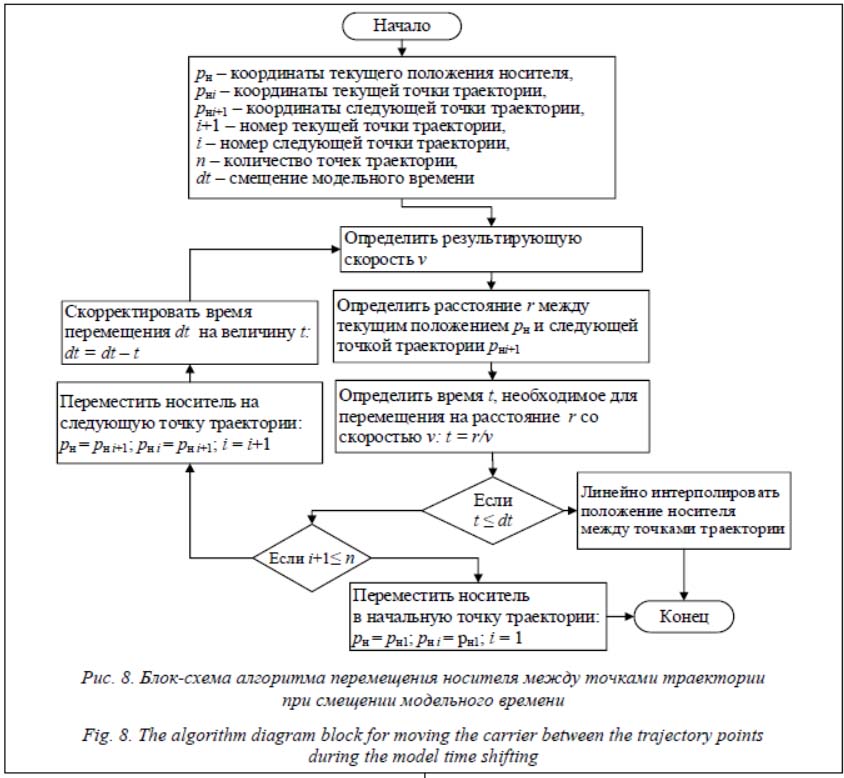
где tзг – время задержки сигнала с генератора; c – скорость света; pц – точка с координатами цели (вычисляется по алгоритму перемещения цели по траектории); pн – точка с координатами носителя (вычисляется по алгоритму переме-щения носителя по траектории). Алгоритм перемещения носителя по траектории. Для моделирования перемещения носителя по траектории в качестве исходных данных используются траектория полета цели и максимальная горизонтальная и вертикальная скорости носителя. Под траекторией носителя (и цели) понимается множество точек, соответствующих требуемым координатам носителя: Trн = {pн0, pн1, …, pнi, pнi+1, …, pнn}, pнi = = {pxнk, pyнk, pzнk}, где Trн – траектория носителя; pн0, pнi, pнn, pнk – точки траектории носителя; pxнk, pyнk, pzнk – координаты точек траектории носителя по осям OX, OY, OZ в декартовой системе координат. Для моделирования движения носителя по траектории необходимо через моменты времени dt менять положение носителя в соответствии с его траекторией и ограничениями скорости движения [8]. Траектория носителя имеет дискретный вид и определена только в некоторых точках (задана таблично), поэтому для позиционирования носителя в любые моменты времени его положение между точками траектории линейно интерполируется [9, 10], что соответствует равномерному прямолинейному движению (рис. 7).
Приведем формулы, необходимые на каждом из этапов выполнения блок-схемы алгоритма. Результирующая скорость носителя определяется следующим образом [4]:
где vрез. – результирующая скорость; Расстояние между точкой положения носителя и следующей точкой траектории определяется следующим образом:
Положение носителя между точками траектории (текущим положением и следующим) линейно интерполируется в предположении, что носитель между точками плана движется равномерно и прямолинейно:
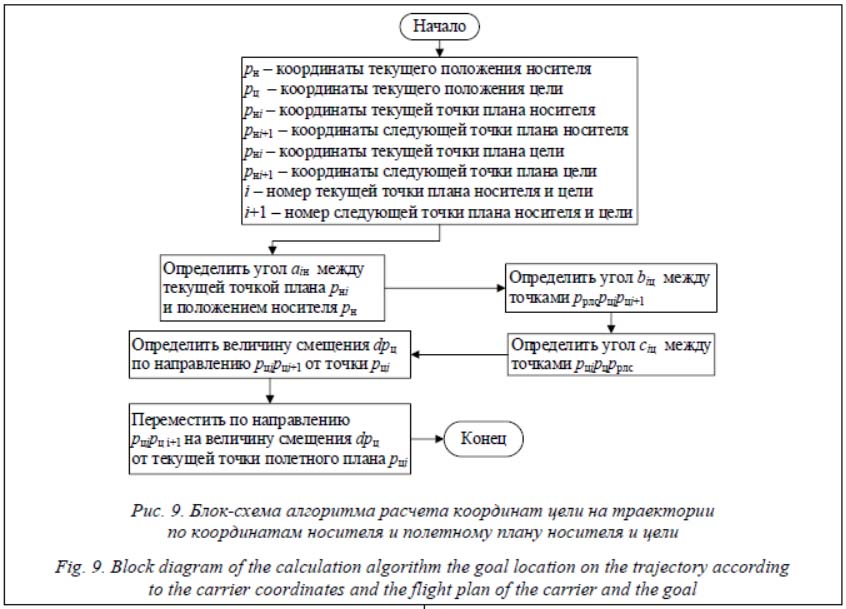
где pн след. – новое положение носителя на траектории; pн тек. – текущее положение носителя на траектории. Алгоритм перемещения цели по траектории. Блок-схема алгоритма изображена на рисунке 9. Траектория цели, как и для носителя, задается множеством точек с координатами, соответствующими требуемым координатам цели: Trц = {pц0, pц1, …, pцi, pцi+1, …, pцn}, pцi={pxцk, pyцk, pzцk}, где Trц – траектория носителя; pц0, pцi, pцn, pцk – точки траектории цели; pxцk, pyцk, pzцk – координаты точек траектории цели по осям OX, OY, OZ в декартовых координатах.
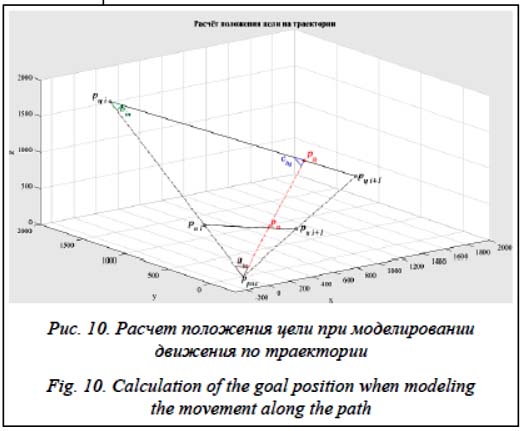
Приведем формулы для вычисления поло-жения цели на траектории [5]. Расчет положе-ния цели графически представлен на рисунке 10. Угол aiн можно вычислить по следующей формуле:
Угол сiц – третий угол треугольника pрлсpцipц, поэтому угол сiц можно вычислить так: сiц = 180 – biц – aiн. Смещение dpц в направлении pцipцi+1 от точки pцi:
Тогда координаты носителя на участке прямой pцipцi+1 можно рассчитать следующим образом:
Модель земной поверхности. Отображе-ние заданного участка карты и привязка коор-динат моделей объектов в программе к положению на карте выполнены следующим образом: сначала номера пикселей растрового изображения карты привязываются к географической системе координат в соответствии со стандартом world-файлов [5, 11]. Привязка выполняется следующим образом:
Тогда координатами пикселя для соответствующих широты и долготы на изображении карты будут:
где xп – номер пикселя в изображении карты по горизонтали; yп – номер пикселя в изображении карты по горизонтали; x¢ – широта в градусах; y¢ – долгота в градусах; A, B, D, E – коэффициенты аффинного преобразования (из world- Если карта не имеет поворота, коэффициенты
Тогда широта и долгота по декартовым координатам для траектории носителя и цели будут Примеры привязки координат моделей в программе к изображению спутниковой карты, выполненных описанным образом, приве-дены на рисунке (см. http://www.swsys.ru/uploaded/image/2021-2/2021-2-dop/15.jpg). Практическое использование Для примера спланируем эксперимент с учетом, что РЛС позиционируется на следующих координатах: широта 50,644707°, долгота 36,576946° (аэропорт Белгорода). Способ обзора пространства круговой, период обзора 12 секунд. Антенна ориентирована по углу места 30 градусов. В распоряжении имеется носитель, способный развить максимальную горизонтальную скорость 10 м/с, вертикальную 3 м/с. Определено минимальное расстояние проведения эксперимента 800 метров (алгоритм определения минимального расстояния в данной работе не рассматривается). Требуемая траектория цели имеет вид цилиндрической спирали с количеством витков 4, распределенных на углах места с 28° по 32°, удаление цели от РЛС должно быть 20 000 м. Результаты планирования приведены на рисунках (см. http://www.swsys.ru/uploaded/image/2021-2/2021-2-dop/16.jpg, http://www.swsys.ru/uploaded/image/2021-2/2021-2-dop/17.jpg, http://www.swsys.ru/uploaded/image/2021-2/2021-2-dop/18.jpg). По результатам планирования и моделирования получена краткая сводка с информацией об эксперименте, представленная в таблице.
Дополнительно сгенерирован файл .xml, содержащий информацию о траектории носителя, который можно загрузить в полетный контроллер DJI A2 с использованием ПО, реализующего лицензионное использование программного интерфейса для этого полетного контроллера. Также сгенерирован файл .txt, содержащий информацию о траектории, который можно загрузить в бортовую ЭВМ (схема бор-тового оборудования и порядок использования результатов планирования указаны на рисунках 2 и 5). Заключение Таким образом, с помощью программы планирования и моделирования эксперимента, представленного на рисунке 1б, решены следующие задачи: планирование эксперимента с учетом привязки к местности, режима работы станции, возможностей используемого носителя, бортового оборудования, траектории полета носителя и имитируемых целей; моделирование хода проведения эксперимента, что позволяет сделать выводы о затраченном времени, длине пути траектории носителя и целей, ожидаемых пределах скоростей носителя и целей на траектории; формирование плана проведения эксперимента в виде конфигурационной информации для носителя и бортового оборудования, содержащей данные о траектории носителя, траектории имитируемых целей. Полученные результаты позволяют при наличии требуемого оборудования и обеспечении ус-ловий проведения эксперимента (выезд на нужную местность, расположение станции на планируемых координатах, режим работы станции, согласованных административных вопросов) провести планируемый эксперимент в реальных условиях по заранее спланированному сценарию, повысив его эффективность. Литература 1. Леонов А.И., Леонов С.А., Нагулинко Ф.В., Омельчук В.П., Степанов С.П. Испытания РЛС (оценка характеристик). М.: Радио и связь, 1990. 208 с. 2. Agilent. Измерения параметров радиолокационных станций. Заметки по применению. URL: https://www.astena.ru/radar_0.html (дата обращения: 15.11.2020). 3. Реброва И.А. Планирование эксперимента. Омск: СибАДИ, 2010. 105 с. 4. Тяпкин В.Н., Фомин А.Н., Гарин Е.Н., Фатеев Ю.Л., Бердышев В.П., Ноговицын А.А., Теме-ров А.В. и др. Основы построения радиолокационных станций радиотехнических войск. Красноярск: Изд-во СФУ, 2016. 535 с. 5. Задорожный А.Г., Персова М.Г., Кошкина Ю.И. Введение в трехмерную компьютерную графику с использованием библиотеки OpenGL. Новосибирск: Изд-во НГТУ, 2018. 100 с. 6. Зюкин В.Ф., Свистунов Д.Ю., Белавин А.В. Требования к удалению имитаторов активных помех при полигонных испытаниях РЛС // Системы обработки информации. 2013. T. 1. № 108. С. 56–60. 7. Бакулев П.А. Радиолокационные системы. М.: Радиотехника, 2015. 440 с. 8. Семушкин И.В., Цыганов А.В., Цыганова Ю.В., Голубков А.В., Винокуров С.Д. Моделирование и оценивание траектории движущегося объекта // Вестн. ЮУрГУ ММП. 2017. T. 10. № 3. С. 108–119. DOI: 10.14529/mmp170309. 9. Фаддеев М.А., Марков К.А. Численные методы. Нижний Новгород: Изд-во ННГУ, 2010. 158 с. 10. Огородникова О.М. Вычислительные методы в компьютерном инжиниринге. Екатеринбург: Изд-во УрФУ, 2013. 130 с. 11. Формат файла географической регистрации (world-файл). URL: https://gis-lab.info/qa/tfw.html (дата обращения: 15.11.2020). References
|




 .
.
| Permanent link: http://swsys.ru/index.php?page=article&id=4815&lang=en |
Print version |
| The article was published in issue no. № 2, 2021 [ pp. 269-280 ] |
Perhaps, you might be interested in the following articles of similar topics:
- Метод испытания радиолокационных станций с использованием беспилотного летательного аппарата и бортового оборудования
- Компонентная модель на основе оптимизациии расширения COM
- Программа расчета пропускной способности гибких производственных ячеек
- Алгоритмы автоматизированной системы управления испытанием оборудования на надежность
- Алгоритм обеспечения требуемого уровня устойчивости управления беспилотным летательным аппаратом в условиях противодействия
Back to the list of articles