Journal influence
Bookmark
Next issue
Program toolkit of knowledge base design for intelligent control
The article was published in issue no. № 3, 2010Abstract:In article the analysis of problems of introduction of intelligent control systems applications is presented. The main stages of design process of robust knowledge bases are described. The efficiency of the control processes with application of the soft computing optimizer is demonstrated by Benchmark («ball–beam») of model of dynamic controlled plant under the conditions of uncertainty information about the parameters of the structure of the controlled plant.
Аннотация:В статье дается анализ проблем реализации интеллектуальных систем управления. Описаны основные этапы работы с оптимизатором баз знаний. Эффективность процессов управления с оптимизатором баз знаний демонстрируется на конкретном примере модели динамического объекта управления («шарик–доска») в условиях неполной информации о параметрах структуры объекта управления.
| Authors: (s.karatkevich@ntpdubna.ru) - , Ph.D, (a.mishin@ntpdubna.ru) - , Ph.D, Tyatyushkina O.Yu. (tyatyushkina@mail.ru) - Dubna State University – Institute of System Analysis and Control (Associate Professor), Dubna, Russia, Ph.D, (pavloon@mail.ru) - | |
| Keywords: knowledge base optimizer, criterion of proximity, intelligent control systems |
|
| Page views: 13121 |
Print version Full issue in PDF (5.84Mb) Download the cover in PDF (1.43Мб) |
Одним из важных элементов наукоемкой информационной технологии проектирования интеллектуальных систем управления (ИСУ) является разработка методологии и соответствующей программно-аппаратной поддержки построения робастных баз знаний (БЗ), устойчивых к различным (внешним и внутренним) случайным возмущениям на объект управления (ОУ) и в каналах измерений или контурах управления. Наряду с этим важными проблемами внедрения ИСУ являются также их слабая адаптивность к изменениям параметров ОУ (вызванным, например, старением структуры ОУ или резким изменением внешней среды) и низкая робастность полученных законов управления в случае непредвиденных ситуаций управления. Актуальность решения данных проблем многократно диктовалась практическими задачами теории и систем управления и не раз отмечалась многими исследователями [1–3]. Для решения проблем были применены технологии интеллектуальных вычислений, включающих мягкие и квантовые вычисления с использованием ряда важных термодинамических, информационно-энтропийных и динамических критериев управления. ИСУ, основанные на новых типах вычислений (мягкие, квантовые и т.п.), привлекают все большее внимание. Исследования показали, что они обладают следующими достоинствами: сохраняют главные преимущества традиционных систем управления (устойчивость, управляемость, наблюдаемость и т.п.); имеют оптимальную с точки зрения заданного критерия качества управления БЗ, а также возможность ее коррекции и адаптации к изменяющейся ситуации управления; гарантируют достижимость требуемого качества управления на основе спроектированной БЗ; способны функционировать в непредвиденных ситуациях управления [1–3]. Для построения новых поколений ИСУ, основанных на технологии мягких и квантовых вычислений, используется разработанный оптимизатор баз знаний (ОБЗ). Общие положения и стратегия технологии проектирования робастных БЗ ИСУ на основе ОБЗ описаны в [3]. Основное внимание в данной статье уделяется описанию особенностей применения ОБЗ для проектирования БЗ ИСУ сложными, существенно-нелинейными и неустойчивыми ОУ на примере динамической системы «шарик–доска». Существует несколько решений данной задачи управления классическими методами. В работе [4] рассматривается ее решение с помощью ПД-регулятора. Кроме того, разработано несколько интеллектуальных контроллеров, таких как нечеткий регулятор, нейронный контроллер, нечеткий нейронный регулятор, которые решают простейшие задачи управления в отсутствие внешних воздействий, ограничений и времени задержки в канале измерения [5]. До настоящего времени моделирование и исследование робастности управления заданного ОУ при задержке времени в контуре управления, различных внешних стохастических воздействиях и ограничениях, а также в случае различных непредвиденных ситуаций управления не проводились.
ОУ, показанный на рисунке 1, представляет собой шарик, движущийся вдоль длинной доски. Положение одной стороны доски жестко зафиксировано, противоположная сторона соединена с электромотором, так что доска может наклоняться под действием приложенной к ней силы. Задачей управления является удержание (стабилизация) шарика в центре доски. При этом в ситуацию управления включены стохастические внешние воздействия, временные задержки в канале измерения состояния объекта и ограничения на максимальную силу управления и движения ОУ. Это сложная задача управления, так как шарик двигается с ускорением в нелинейной зависимости от наклона доски и находится в неустойчивом динамическом состоянии. Математическая модель данного ОУ представлена следующими уравнениями движения:
где a – угол поворота доски; r – положение шара (обобщенные координаты динамической системы); L – длина доски; M – ее масса; m – масса шара; J1=Ia+Ib, где Ia, Ib – моменты инерции доски (0,02 кг·м2) и шара (2×10-6 кг·м2); N – сила трения; t – сила управления. Рассмотрим параметры модели: m=0,06 кг; M=0,12 кг; L=1 м; g=9,8 м/сек2. Введем ограничения на силу управления В качестве ИСУ выберем нечеткий ПИД-регулятор с моделью нечеткого вывода Сугено [1]. Сила управления вычисляется следующим образом:
где Таким образом, проектируемый гибридный нечеткий ПИД-регулятор имеет 6 входных и 6 выходных переменных, которые вычисляются как результат нечеткого вывода на основе БЗ, построенной с помощью ОБЗ. Данная задача относится к сложно решаемой проблеме координационного управления нелинейными системами, неустойчивыми по части обобщенных координат. Основные этапы построения БЗ ИСУ с помощью ОБЗ
Этап 2. Построение обучающего сигнала (ОС) происходит на основе стохастического моделирования поведения ОУ в типовой ситуации, проведенного с использованием математической модели ОУ и генетического алгоритма (ГА) с выбранными критерием оптимизации и областью случайного поиска. Этап 3. Выбор модели нечеткого вывода. Пользователь конкретизирует тип нечеткой модели вывода (Сугено, Мамдани и т.д.), операцию нечеткого И (произведение или минимум), число входных и выходных переменных. В данном случае это модель Сугено. Пусть n1, n2, n3 –количество функций принадлежности, описывающих ошибку управления е, ее скорость и интеграл, тогда общее число нечетких правил будет n1´n2´n3. Само нечеткое (продукционное) правило в БЗ выглядит следующим образом:
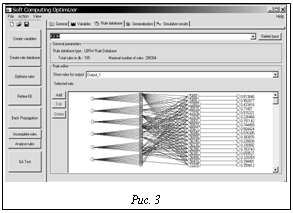
где Этап 4. Создание лингвистических переменных для входных значений (ошибка управления, скорость ошибки управления, интегральная ошибка управления) нечеткого регулятора (НР). С помощью ГА для каждой входной лингвистической переменной определяется оптимальное число функций принадлежности, а также выбирается оптимальная форма представления их функций принадлежности (треугольная, гауссовская и т.д.). В качестве информационного критерия оптимальности той или иной конфигурации лингвистических переменных используются максимум совместной информационной энтропии и минимум информации о сигналах в отдельности. На рисунке 2 показан пример построения лингвистических переменных с помощью ОБЗ. Как видно из рисунка, для описания входных значений ошибки управления ОБЗ с помощью ГА выбрал 8 функций принадлежности. Этап 5. Создание, оптимизация и настройка базы правил. На данном этапе используется специальный алгоритм отбора наиболее робастных правил в соответствии с разработанными критериями. Кроме того, с помощью серии ГА находится оптимальная структура БЗ. Пример построенной с помощью ОБЗ оптимальной БЗ для заданного ОУ показан на рисунке 3. Из рисунка видно, что полная структура БЗ для данного НР состоит из 290304 продукционных правил. Однако ОБЗ выбрал оптимальную структуру БЗ, состоящую из 105 правил, то есть осуществил редукцию избыточности информации в БЗ продукционных правил.
Замечание 1. В типовую ситуацию 1 включены описанные выше параметры модели, ограничение и задержка времени в измерительной системе, следующие начальные условия: Типовая ситуация 2 отличается от первой включением другого типа внешнего шума – рэлеевского. Моделирование разработанной модели ИСУ и ОУ осуществлялось в системе Matlab/Simulink версии 6.5. На рисунках 4 и 5 для трех типов управления показано сравнение динамического поведения заданного ОУ в типовой и новой (непредсказуемой) ситуации, в которой время задержки в канале измерения увеличилось в шесть раз, до 0,03 сек. Как видно из результатов моделирования, традиционный ПИД-регулятор плохо выполняет поставленную задачу управления даже в типовой ситуации, с новой нештатной ситуацией просто не справляется и движение ОУ неуправляемо. НР1 с БЗ1 успешно решает задачу управления как в типовой, так и в новой ситуации. В заключение следует отметить, что на основе новых видов интеллектуальных вычислений и вновь разработанного инструментария ОБЗ эффективно проектируются робастные ИСУ, способные функционировать во множестве как типовых, так и новых (непредвиденных) ситуаций управления. Литература 1. Litvintseva L.V., Takahashi K., Ulyanov S.S. et all. Intelligent robust control design based on new types of computations. Note del Polo Ricerca, Universita degli Studi di Milano Publ., Vol. 60, 2004. 2. Интеллектное управление динамическими системами / С.Н. Васильев [и др.]. М.: Физматгиз, 2000. 3. Литвинцева Л.В., Ульянов С.В., Ульянов С.С. Построение робастных баз знаний нечетких регуляторов для интеллектуального управления существенно-нелинейными динамическими системами. Ч. II // Изв. РАН. ТиСУ. 2006. № 5. 4. Yu W., Otriz F. Stability analysis of PD regulation for ball and beam system // Proc. of the 2005 IEEE Conference on Control Applications, Toronto, Canada, August 28–31, 2005, pp. 517–522. 5. Jiang Y.H., McCorkell C., Zmood R.B. Application of neural networks for real time control of a ball-beam system // Proc. of IEEE International Conference on Neural Networks, 1995, Vol. 5, pp. 2397–2402. |
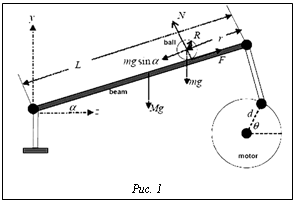 Динамическая система «шарик–доска» (рис. 1) – весьма популярный и широко используемый пример (так называемый benchmark) для изучения моделей управления в теории и систем управления.
Динамическая система «шарик–доска» (рис. 1) – весьма популярный и широко используемый пример (так называемый benchmark) для изучения моделей управления в теории и систем управления.
 ,
, ; время задержки в системе измерения равно 0,005 сек.
; время задержки в системе измерения равно 0,005 сек.

 – переменные коэффициенты управления ПИД-регулятором, которые вычисляются на каждом шаге управления.
– переменные коэффициенты управления ПИД-регулятором, которые вычисляются на каждом шаге управления.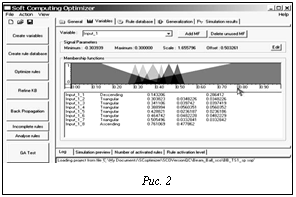 Этап 1. Определение типовой ситуации обучения (параметры математической модели ОУ; определение внешних шумов, начальных условий, ограничений и времени задержки).
Этап 1. Определение типовой ситуации обучения (параметры математической модели ОУ; определение внешних шумов, начальных условий, ограничений и времени задержки). ,
, где A1, B1, C1 – функции принадлежности, описывающие ошибку управления е, ее скорость и интеграл. Конечный результат нечеткого вывода в заданной БЗ вычисляется по следующим формулам:
где A1, B1, C1 – функции принадлежности, описывающие ошибку управления е, ее скорость и интеграл. Конечный результат нечеткого вывода в заданной БЗ вычисляется по следующим формулам: ;
;  ;
;  ,
, , « × » – символ операции нечеткого умножения.
, « × » – символ операции нечеткого умножения. Рассмотрим результаты моделирования поведения нашего динамического объекта под управлением трех типов: ПИД-регулятора с постоянными коэффициентами усиления K=[5.1660 9.3039 0.83489.9227 0.8348 9.3426], НР1 с БЗ1 (разработанной для типовой ситуации 1) и НР2 с БЗ2 (разработанной для типовой ситуации 2).
Рассмотрим результаты моделирования поведения нашего динамического объекта под управлением трех типов: ПИД-регулятора с постоянными коэффициентами усиления K=[5.1660 9.3039 0.83489.9227 0.8348 9.3426], НР1 с БЗ1 (разработанной для типовой ситуации 1) и НР2 с БЗ2 (разработанной для типовой ситуации 2).
 и гауссовский внешний шум.
и гауссовский внешний шум.| Permanent link: http://swsys.ru/index.php?id=2553&lang=en&page=article |
Print version Full issue in PDF (5.84Mb) Download the cover in PDF (1.43Мб) |
| The article was published in issue no. № 3, 2010 |
Perhaps, you might be interested in the following articles of similar topics:
- Технология мягких вычислений в проектировании интеллектуальных систем управления
- Программная платформа для оператора 6PL
- Нечеткий регулятор со скользящим режимом на основе мягких вычислений
- Программная платформа для виртуального посреднического оператора в сфере услуг
- Когнитивные регуляторы: технологии мягких вычислений и информационно-термодинамический закон самоорганизации интеллектуального управления
Back to the list of articles