Journal influence
Bookmark
Next issue
The method of quality factors estimation for radar detection
The article was published in issue no. № 2, 2014 [ pp. 118-124 ]Abstract:Nowadays stealth technologies are widely used. That is why the radiated radar -tracking signal is essentially r e-flected and absorbed. Thus, the power of a reflected signal on an intake radar entry is decreased. It complicates airplane d e-tection, or other object creat ed according to similar technology. Under these conditions it is difficult to estimate quality fa c-tors of radar detection of stealth and small targets. In many cases the radar signals amplitude and a phase is unknown parametres. The models of signals are u sed often when there are fast (in relation to clock frequency) fluctuations amplitude signals and a phase when there is no possibility to es ti-mate their values according to the results of preliminary statistical estimation on the previous intervals. We propose a technique which allows determining the quality of radar detection for a wide class of models of signals (i n-cluding stealth and small targets) in terms of stationary Gaussian noise, impulse noise and in non -jamming environment. The technique uses the obtained analytical expressions and approximation of distributions with Gram–Charlier series in Edge-worth Expansion. Detection threshold for given probabilities of false alarm is defined by Newton's method. It improves the accuracy and simplifies the calculations. The article shows the estimates for quality detection under these conditions. The de-veloped methodology and the resulting estimates can be used to determine quality factors of higher hierarchical level sys-tems. For example, indicators of secondar y signal processing, probability of signal detection (capture) in the search area.
Аннотация:В настоящее время из-за широкого использования технологий снижения заметности излучаемый радиолокационный сигнал существенно отражается и поглощается. Таким образом, значительно уменьшается мощность поступающего на вход приемного устройства РЛС отраженного сигнала, что затрудняет обнаружение самолета либо другого объекта, выполненного по подобной технологии. В этих условиях сложно оценить показатели качества обнаружения малозаметных и малоразмерных целей. Во многих случаях амплитуда и фаза сигналов РЛС являются случайными неизвестными параметрами. В условиях достаточно быстрых по отношению к тактовой частоте сигналов флуктуаций амплитуды и фазы, когда отсутствует возможность определения их значений по результатам предварительного статистического оценивания на предыдущих интервалах, часто используют модели сигналов. В работе предложена методика, позволяющая определять показатели качества обнаружения РЛС для широкого класса моделей сигналов, в том числе малозаметных и малоразмерных целей, в условиях стационарных гауссовских, шумовых импульсных помех, а также в беспомеховой обстановке. Методика использует полученные аналитические выражения и аппроксимации распределений рядом Грама–Шарлье в приближении Эджворта. Значение порога обнаружения для заданных вероятностей ложной тревоги определяется методом Ньютона, что позволяет повысить точность и упростить вычисления. Получены оценки показателей качества обнаружения в рассматриваемых условиях. Разработанная методика и полученные оценки могут быть использованы для определения показателей качества систем более высокого иерархического уровня, например показателей вторичной обработки сигналов, вероятности обнаружения (захвата) сигнала в зоне поиска.
| Authors: Platonov A.Yu. (romkord@yandex.ru) - Main Department of Scientific and Research Activities and Technological Support of the Advanced Technologies of the Ministry of Defense of the Russian Federation, Moscow, Russia, Pomazuev O.N. (romkord@yandex.ru) - Main Department of scientific and research activities and technological support of the advanced technologies of the Ministry of defense of the Russian Federation, Main Department of scientific and research activities and technological support of the advanced technologies of the Ministry of defense of the Russian Federation, Russia, Mironov A.M. (ncuog@mail.ru) - Ministry of Defense, Moscow, Russia, Abu-Abed, F.N. (aafares@mail.ru) - Tver State Technical University (Associate Professor, Dean), Tver, Russia, Ph.D, Ryumshin A.R. (rvdopira@yandex.ru) - Developed in the Research Institute "CENTERPROGRAMMSYSTEM", Tver, Russia, Ph.D | |
| Keywords: correct detection and false alarm probabilities, signals detector, accumulation of a pack of impulses, signal model, detection quality factors |
|
| Page views: 15940 |
Print version Full issue in PDF (6.10Mb) Download the cover in PDF (0.87Мб) |
Развитие технологий снижения заметности [1, 2] привело к тому, что излучаемый радиолокационный сигнал существенно отражается и поглощается. Таким образом, значительно уменьшается мощность поступающего на вход приемного устройства радиолокационной станции (РЛС) отраженного сигнала, что затрудняет обнаружение самолета либо другого объекта, выполненного по подобной технологии. В этих условиях сложно оценить показатели качества обнаружения малозаметных и малоразмерных целей. Необходимо разработать методику M: Во многих случаях амплитуда и фаза сигналов РЛС являются случайными неизвестными параметрами. В условиях достаточно быстрых по отношению к тактовой частоте сигналов флуктуаций амплитуды и фазы, когда отсутствует возможность определения их значений по результатам предварительного статистического оценивания на предыдущих интервалах, часто используют модели сигналов. Характеристики принимаемых сигналов задаются релеевским распределением, которое правильно описывает отраженный сигнал от целей с большим числом случайно расположенных независимых отражающих элементов, а также пятью моделями Сверлинга [3]: – первая соответствует цели, которую можно представить как совокупность независимых случайных рассеивателей при флуктуации от цикла к циклу сканирования; – вторая – модель флуктуирующей цели от импульса к импульсу, которую можно представить как совокупность независимых случайных рассеивателей; – третья соответствует цели, которую можно свести к одному большому и прочим малым отражателям (малозаметные и малоразмерные цели на фоне отражений) при флуктуации от цикла к циклу сканирования; – четвертая – модель флуктуирующей цели от импульса к импульсу, которую можно представить как один большой и прочие малые отражатели; – пятая соответствует цели с одним рассеивающим элементом в отсутствие флуктуаций. Накопление нескольких реализаций, соответствующих отражениям от одной совокупности целей, существенно улучшает характеристики РЛС. Обработка множества независимых наблюдений значительно увеличивает вероятность обнаружения цели на фоне мешающих отражений. Определим показатели качества обнаружения (вероятности правильного обнаружения D и ложной тревоги F) для РЛС, использующих когерентное обнаружение сигнала в квадратурах и некогерентные обнаружители. Рассмотрим когерентное обнаружение пачки M принимаемых импульсов сигнала, флуктуирующего по закону Релея, в квадратурах на выходе линейного детектора в условиях стационарных шумовых гауссовских помех. Показатели качества обнаружения можно определить следующим образом:
Во многих случаях отражения от целей могут иметь протяженный характер, тогда их обнару- жение может быть сведено к модели многоканального некогерентного весового обнаружителя сигналов различной мощности. Рассматривается G-канальный весовой обнаружитель с весовыми коэффициентами bgr, осуществляющий в каждом g-м канале Для заданных условий и флуктуирующего по закону Релея сигнала выражения для определения показателей качества обнаружения [5] имеют следующий вид:
где
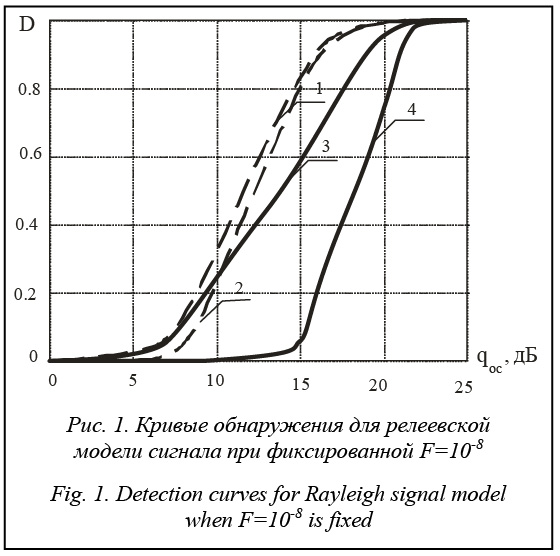
На рисунке 1 приведены кривые обнаружения D=f(qос) при фиксированном значении F=10-8, где qос
кривая 1 – кривая 2 – bgr=1; кривая 3 – bgr= кривая 4 – На практике часто приходится сталкиваться с ситуацией, когда помеха представляет собой случайный стационарный поток взаимно неперекрывающихся шумовых радиоимпульсов постоянной мощности Для сигнала, флуктуирующего по закону Релея, и рассматриваемых условий показатели качества обнаружения имеют следующий вид:
где
Рассмотрим обнаружение других моделей сигнала в беспомеховой обстановке. Плотность распределения вероятности случайного напряжения сигнала A>0, представленного пятой моделью Сверлинга, в случае некогерентного накопления пачки N импульсов на выходе квадратичного детектора в условиях отсутствия помех имеет следующий вид:
где IN–1 (∙) – модифицированная функция Бесселя N–1 порядка [7]. Точных выражений для определения показателей качества обнаружения в этом случае получить не удается, значение вероятности правильного обнаружения можно определить при использовании в качестве аппроксимации распределения ряд Грама–Шарлье в приближении Эджворта [8, 9]. Тогда вероятность правильного обнаружения может быть определена следующим образом:
где
Для рассматриваемого случая вероятность ложной тревоги можно определить, используя следующее выражение:
где ГI (∙) – неполная гамма-функция [7]. Используя метод Ньютона, можно получить значение порога обнаружения для заданной F:
где
nF – количество ложных тревог [8]. Начальное значение порога обнаружения [7] определяется как
Количество итераций определяется следующим выражением:
На рисунке 3 представлены кривые обнаружения D=f(Q) при фиксированном значении F=10-9 для рассматриваемого случая, кривая 1 соответствует N=1, а кривая 2 – N=10. Плотность распределения вероятности случайного напряжения сигнала, представленного четвертой моделью Сверлинга, в случае некогерентного накопления пачки N импульсов на выходе квадратичного детектора в условиях отсутствия помех имеет вид
где Для случая, когда N<50, значение вероятности правильного обнаружения [7] определяется как
где Для случая, когда N³50 точных выражений для определения показателей качества обнаружения получить не удается, значение вероятности правильного обнаружения можно определить, используя в качестве аппроксимации распределения ряд Грама–Шарлье в приближении Эджворта [8, 9], выражением (7), коэффициенты в котором вычисляются следующим образом:
Значение порога обнаружения для заданной F можно получить, используя выражения (9)–(12).
Плотность распределения вероятности случайного напряжения сигнала, представленного третьей моделью Сверлинга, в случае некогерентного накопления пачки N импульсов на выходе квадратичного детектора в условиях отсутствия помех [7] имеет вид
В этом случае для N£2 значение вероятности правильного обнаружения [7] определяется следующим образом:
Для случая, когда N>2, выражение для определения вероятности правильного обнаружения [7] будет иметь вид
Значение порога обнаружения для заданной F можно получить, используя выражения (9)–(12).
Плотность распределения вероятности случайного напряжения сигнала, представленного второй моделью Сверлинга, в случае некогерентного накопления пачки N импульсов на выходе квадратичного детектора в условиях отсутствия помех [7] имеет вид
Для случая, когда N£50, значение вероятности правильного обнаружения [7] определяется следующим образом:
Для случая, когда N>50 точных выражений для определения показателей качества обнаружения получить не удается, значение вероятности правильного обнаружения можно определить, используя в качестве аппроксимации распределения ряд Грама–Шарлье в приближении Эджворта [8, 9], выражением (7), коэффициенты в котором вычисляются следующим образом:
Значение порога обнаружения для заданной F можно получить, используя выражения (9)–(12). На рисунке 6 представлены кривые обнаружения D=f(Q) для рассматриваемого случая при фиксированном значении F=10-9, кривая 1 соответствует N=1, кривая 2 – N=10, кривая 3 – N=50, а кривая 4 – N=100. Плотность распределения вероятности случайного напряжения сигнала, представленного первой моделью Сверлинга, в случае некогерентного накопления пачки N импульсов на выходе квадратичного детектора в условиях отсутствия помех [7] имеет следующий вид:
Для этих условий вероятность правильного обнаружения [7] можно определить как
Значение порога обнаружения для заданной F можно получить, используя выражения (9)–(12).
Разработанная методика позволяет рассчитать показатели качества обнаружения РЛС для широкого класса моделей принимаемых сигналов, в том числе малозаметных и малоразмерных целей, которые могут быть использованы для определения показателей качества систем более высокого иерархического уровня, например, показателей вторичной обработки сигналов, вероятности обнаружения (захвата) сигнала в зоне поиска. Литература 1. Куприянов А.И., Сахаров А.В. Теоретические основы радиоэлектронной борьбы. М.: Вузовская книга, 2007. 2. Современная радиоэлектронная борьба. Вопросы методологии; [под ред. В.Г. Радзиевского]. М.: Радиотехника, 2006. 3. Справочник по радиолокации; [под ред. М. Сколника]. М.: Сов. радио, 1977. Т. 1. 4. Кузьмин Г.В., Иванов А.Н., Рюмшин А.Р., Ягольни- ков С.В. Методика оценки эффективности РЛС обнаружения и сопровождения траекторий целей в условиях помех // Радиотехника (Журнал в журнале). 1996. № 11. 5. Кузьмин Г.В., Рюмшин А.Р., Шевчук В.И., Ягольни- ков С.В. Рабочие характеристики многоканального некогерентного весового обнаружителя сигналов различной мощности в условиях стационарных шумовых помех // Радиотехника (Журнал в журнале). 1997. № 11. 6. Кузьмин Г.В., Рюмшин А.Р., Шевчук В.И., Ягольни- ков С.В. Оценка эффективности и обоснование помех многоканальному некогерентному весовому обнаружителю сигналов различной мощности // Радиотехника (Журнал в журнале). 1998. № 2. 7. Mеikle Н. Modern Radar Systems. 2nd ed. Artech House, 2008. 8. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. М.: Наука, 1984. 9. Справочник по специальным функциям; [под ред. М. Абрамовица и И. Стиган]. М.: Наука, 1979. References 1. Kupriyanov A.I., Sakharov A.V. Teoreticheskie osnovy radioelektronnoy borby [Theoretical basics of radioelectronic struggle]. Moscow, Vuzovskaya kniga, 2007, 356 p. 2. Radzievskiy V.G., ed. Sovremennaya radioelektronnaya borba. Voprosy metodologii [Modern radioelectronic struggle. Methodology issues]. Moscow, Radiotexnika Publ., 2006, 424 p. 3. Skolnik M. Spravochnik po radiolokatsii [Radiolocation guide]. Moscow, Sоv. rаdiо Publ., vol. 1, 1977, 456 p. 4. Кuzmin G.V., Ivanov А.N., Ryumshin А.R., Yagolni- kov S.V. A technique for efficiency assessment of radar detection and moving target tracking under noise conditions. Radiotekhnika [Radioengineering]. 1996, no. 11. 5. Кuzmin G.V., Ryumshin А.R., Shevchuk V.I., Yagolni- kov S.V. Operating characteristics of multy-channel incoherent weighted detector for signals with different power under permanent noise conditions. Radiotekhnika [Radioengineering]. 1997, no. 11. 6. Кuzmin G.V., Ryumshin А.R., Shevchuk V.I., Yagolni- kov S.V. An efficiency assessment and noise validation for multy-channel incoherent weighted detector for signals with different power. Radiotekhnika [Radioengineering]. 1998, no. 2. 7. Mеikle Н. Modern radar systems. 2nd edition, Artech House Publ., 2008, 563 p. 8. Kоrn G.A., Kоrn Т.M. Spravochnik po matеmаtikе dlya naushnykh rabotnikov i inzhеnеrоv [Guide on mathematics for scientists and engineers]. Russ. ed.: Moscow, Nauka Publ., 1984, 832 p. 9. Abramovits M., Stigan I. eds. Spravochnik po spetsialnym funktsiyam [Guide on special functions]. Moscow, Nauka Publ., 1979, 832 p. |
 ® ®{D, F}, позволяющую определять показатели качества обнаружения РЛС для широкого класса моделей сигналов, в том числе малозаметных и малоразмерных целей.
® ®{D, F}, позволяющую определять показатели качества обнаружения РЛС для широкого класса моделей сигналов, в том числе малозаметных и малоразмерных целей.  – вектор характеристик принимаемых сигналов, определяемый целевой и помеховой обстановками;
– вектор характеристик принимаемых сигналов, определяемый целевой и помеховой обстановками;  – вектор характеристик используемых обнаружителей в РЛС; {D, F} – вероятности правильного и ложного обнаружения.
– вектор характеристик используемых обнаружителей в РЛС; {D, F} – вероятности правильного и ложного обнаружения. (1)
(1) (2)
(2)
 значения мощности помехи и сигнала соответственно; S0 – значение порога обнаружения, нормированное к sш [4].
значения мощности помехи и сигнала соответственно; S0 – значение порога обнаружения, нормированное к sш [4]. некогерентное (на выходе квадратичного детектора) накопление пачки из R импульсов различной мощности
некогерентное (на выходе квадратичного детектора) накопление пачки из R импульсов различной мощности  . Каналы этого обнаружителя идентичны (дисперсия внутренних шумов
. Каналы этого обнаружителя идентичны (дисперсия внутренних шумов  .
. (3)
(3) , (4)
, (4) и
и  ,
, ;
;
 ;
;  ; z – порог обнаружения.
; z – порог обнаружения. – ослабление сигнала за счет дальности до объекта локации. Характеристики получены для следующих исходных данных:
– ослабление сигнала за счет дальности до объекта локации. Характеристики получены для следующих исходных данных:
 ;
; ;
; .
. , в общем случае различной для каждого из каналов, с гауссовским распределением амплитуды напряжения внутри импульса, заданный средними значениями длительности
, в общем случае различной для каждого из каналов, с гауссовским распределением амплитуды напряжения внутри импульса, заданный средними значениями длительности  и
и  периода следования импульсов шумовой импульсной помехи. При этом обеспечивается ∆fП≈∆fС, где ∆fП(С) – ширина спектра помехи (сигнала) по уровню половинной мощности.
периода следования импульсов шумовой импульсной помехи. При этом обеспечивается ∆fП≈∆fС, где ∆fП(С) – ширина спектра помехи (сигнала) по уровню половинной мощности.
 и
и  ,
, ,
,  ,
, ,
,  ,
,  – вероятность появления импульса помехи в элементе разрешения обнаружителя [6].
– вероятность появления импульса помехи в элементе разрешения обнаружителя [6].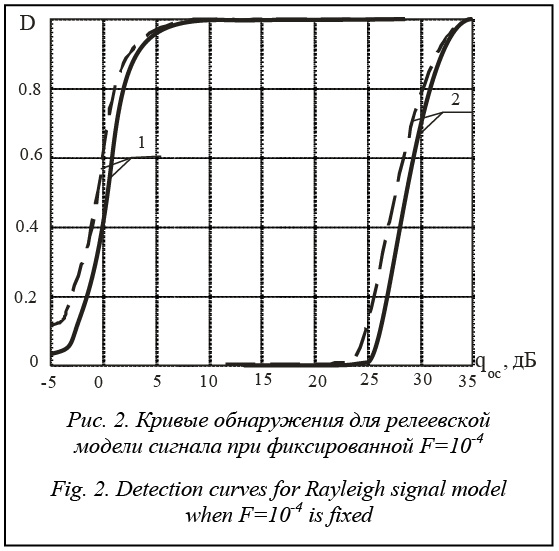
 (сплошные линии) и
(сплошные линии) и  (штриховые линии) при постоянной нормированной средней мощности помехи v=u2m=1. Проведенный анализ эффективности шумовых импульсных помех [6] показывает, что в условиях таких помех качество функционирования обнаружителя снижается по сравнению со стационарными шумовыми помехами, это происходит вследствие увеличения вероятности ложных тревог. Существует оптимальное значение m0, соответствующее наихудшему качеству обнаружения полезного сигнала, то есть минимуму D для фиксированных F. Кривые 1 и 2 на рисунке 2 отображают воздействие стационарных шумовых (m=1) и шумовых импульсных (m=m0) помех соответственно.
(штриховые линии) при постоянной нормированной средней мощности помехи v=u2m=1. Проведенный анализ эффективности шумовых импульсных помех [6] показывает, что в условиях таких помех качество функционирования обнаружителя снижается по сравнению со стационарными шумовыми помехами, это происходит вследствие увеличения вероятности ложных тревог. Существует оптимальное значение m0, соответствующее наихудшему качеству обнаружения полезного сигнала, то есть минимуму D для фиксированных F. Кривые 1 и 2 на рисунке 2 отображают воздействие стационарных шумовых (m=1) и шумовых импульсных (m=m0) помех соответственно. (6)
(6)
 , (7)
, (7) ,
,  ;
; ;
;  ;
;  ;
;

 – функция ошибок; ST – порог обнаружения.
– функция ошибок; ST – порог обнаружения. , (8)
, (8) (9)
(9)
 , (10)
, (10) . (11)
. (11) . (12)
. (12) (13)
(13) – вырожденная гипергеометрическая функция [7].
– вырожденная гипергеометрическая функция [7]. (14)
(14) .
. ;
;  ;
; ;
;  ;
;  .
.
 На рисунке 4 представлены кривые обнаружения D=f(Q) при фиксированном значении F=10-9 для рассматриваемого случая, кривая 1 соответствует N=1, кривая 2 – N=10, кривая 3 – N=50, а кривая 4 – N=100.
На рисунке 4 представлены кривые обнаружения D=f(Q) при фиксированном значении F=10-9 для рассматриваемого случая, кривая 1 соответствует N=1, кривая 2 – N=10, кривая 3 – N=50, а кривая 4 – N=100. .(15)
.(15) (16)
(16)
 (17)
(17)
 На рисунке 5 представлены кривые обнаружения D=f(Q) для рассматриваемого случая при фиксированном значении F=10-9, кривая 1 соответствует N=1, кривая 2 – N=10, кривая 3 – N=50, а кривая 4 – N=100.
На рисунке 5 представлены кривые обнаружения D=f(Q) для рассматриваемого случая при фиксированном значении F=10-9, кривая 1 соответствует N=1, кривая 2 – N=10, кривая 3 – N=50, а кривая 4 – N=100. . (18)
. (18) . (19)
. (19)
 (20)
(20) (21)
(21) На рисунке 7 представлены кривые обнаружения D=f(Q) для рассматриваемого случая при фиксированном значении F=10-12, кривая 1 соответствует N=1, кривая 2 – N=10, кривая 3 – N=50, а кривая 4 – N=100.
На рисунке 7 представлены кривые обнаружения D=f(Q) для рассматриваемого случая при фиксированном значении F=10-12, кривая 1 соответствует N=1, кривая 2 – N=10, кривая 3 – N=50, а кривая 4 – N=100.| Permanent link: http://swsys.ru/index.php?id=3820&lang=en&page=article |
Print version Full issue in PDF (6.10Mb) Download the cover in PDF (0.87Мб) |
| The article was published in issue no. № 2, 2014 [ pp. 118-124 ] |
Back to the list of articles