Journal influence
Bookmark
Next issue
A spatio-temporal model of a material and technical resources traffic network of a radio-electronic facilities group exploitation
Abstract:Support of complicated radio-electronic facilities (REF) reliability at the established level mostly depends on the operation effectiveness of the current technical exploitation system, with the logistic system (LS) as one of the component part. The main task of the LS is considered to be well-timed supply of material resources (MR), which are necessary for REF proper exploitation. At the same time, the task of fast and proper decision-making when controlling necessary resources supply becomes relevant due to considerable space diversity and remoteness of special-purpose systems with REF as the basic element from storage and maintenance bases. To perform the task it is necessary to know possible (preferable) routs of MR delivery, taking into consideration emergency situations, traffic jams, roadways heavy maintenance, natural disasters and other factors, as well as the choice of optimal route variants according to the desired time value and/or MR delivery cost. Taking into account the above-mentioned facts, this research suggests a spatio-temporal model of logistics system of the group of radio-electronic facilities transportation network exploitation. This model can help to solve the task of selecting preferable MR delivery routes according to established criteria.
Аннотация:Поддержание надежности сложных радиоэлектронных средств на заданном уровне в первую очередь зависит от эффективности функционирования существующей системы технической эксплуатации, одной из составных частей которой является система материально-технического обеспечения. Основной задачей данной системы является своевременное пополнение запасов материально-технических ресурсов, необходимых для правильной эксплуатации радиоэлектронных средств. При этом в связи со значительным пространственным разнесением комплексов специального назначения, основу которых составляют радиоэлектронные средства, от баз хранения и ремонта становится актуальной задача быстрого и правильного принятия решения при управлении доставкой необходимых ресурсов. Для этого требуется знать возможные (предпочтительные) маршруты доставки материально-технических ресурсов с учетом различных аварийных ситуаций, дорожных заторов, масштабных дорожных работ, природных катаклизмов и других факторов, а также оптимальные из них по критерию требуемого значения времени и (или) стоимости доставки материально-технических ресурсов. В работе предложена пространственно-временная модель транспортной сети системы материально-технического обеспечения эксплуатации группировки радиоэлектронных средств, на основе которой может быть решена задача определения предпочтительных маршрутов доставки материально-технических ресурсов до потребителя и выбора из них оптимального маршрута по заданным критериям.
| Authors: S.V. Ignatev (pogrebnserg@mail.ru) - Yaroslavl Higher Military College of Air Defense (Professor), Yaroslavl, Russia, Ph.D, V.B. Tikhonov () - Yaroslavl Higher Military College of Air Defense (Associate Professor), Yaroslavl, A.V. Krasnikov (alexalexosipov@mail.ru) - Yaroslavl Higher Military College of Air Defense (Senior Lecturer), Yaroslavl, Russia, Ph.D, А.А. Оsipov (alexalexosipov@mail.ru) - Yaroslavl Higher Military College of Air Defense (Adjunct), Yaroslavl, Russia | |
| Keywords: graph, transportation network, spatio-temporal model, material resources, radio-electronic facilities, logistic system |
|
| Page views: 9286 |
PDF version article Full issue in PDF (21.91Mb) Download the cover in PDF (0.59Мб) |
Основу системы технической эксплуатации составляют подсистемы технического обслуживания, диагностирования и материально-технического обеспечения (МТО). Функционирование первых двух систем направлено на увеличение времени наработки радиоэлектронных средств (РЭС) на отказ T0 и уменьшение времени их восстановления Tв соответственно. На сегодняшний день исследования ведутся по каждой системе, причем в разных направлениях. При этом все больше внимания уделяется экспертным системам или системам поддержки принятия решения обслуживающим пер- соналом в процессе технической эксплуатации сложных РЭС. Известны определенные результаты данных исследований в области технического диагностирования и обслуживания [1–4]. Однако они получены при определенных ограничениях, одним из которых является допущение того, что РЭС полностью укомплектованы требуемыми материально-техническими ресурсами (МТР) и последние не оказывают никакого влияния на T0 и Tв. Такая ситуация не в полной мере соответствует действительности, что приводит к необходимости более глубокого исследования системы материально-технического обеспечения (СМТО). Под СМТО эксплуатации понимается совокупность материальных, транспортных, информационных и других компонентов, служащих для функционирования технической системы с заданной эф- фективностью. Одной из основных задач МТО яв- ляется своевременная доставка до потребителя МТР [5]. Ее решение характеризуется временем доставки tд (составляющая Tв) и определяется как tд = tси + tфс + tтр, (1) где tси – время сбора информации о наличии МТР в подразделениях СМТО; tфс – время формирования схемы транспортировки МТР; tтр – время транспортировки МТР. Опыт эксплуатации показывает, что среди составляющих времени tд наиболее высокие значения имеет время транспортировки, которое зависит от ряда факторов. Прежде всего это взаимное расположение на местности пунктов отправки и пунктов приема МТР, что определяет пространственную топологию транспортной сети (так называемый пространственный параметр), и время транспортировки, которое определяется расстоянием s между пунктами доставки и средней скоростью движения v, которая, в свою очередь, зависит от типа транспортного средства, доставляющего груз. Последние две величины определяют временной параметр транспортной сети. Анализ существующей СМТО РЭС показывает, что на сегодняшний день задача выбора оптимального маршрута (схемы перевозки) МТР с точки зрения минимума tтр решается не в полной мере [6]. Для комплексного учета всех возможных ситуаций и принятия правильного решения по обеспечению требуемыми ресурсами потребителя необходимо построить модель транспортной сети СМТО, которую назовем пространственно-временной моделью. Для этого решим задачу формализации, то есть осуществим переход от концептуальной модели (разнотипных элементов системы, описанных в терминах предметной области) к ее математическому описанию (формальным однотипным). Очевидно, что наиболее просто это осуществить, используя теорию графов [7–9].
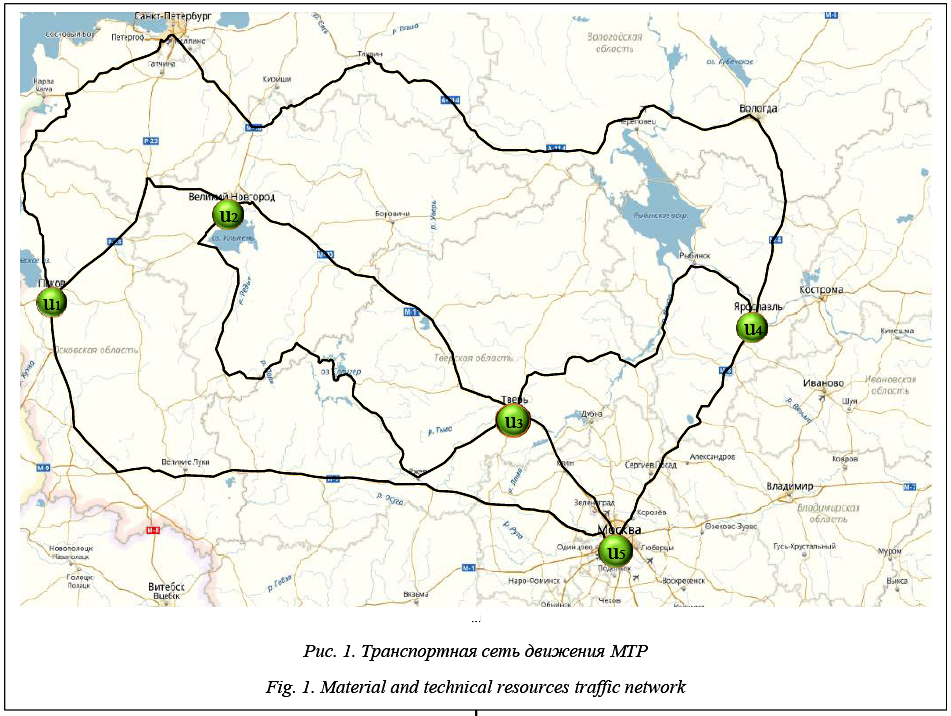
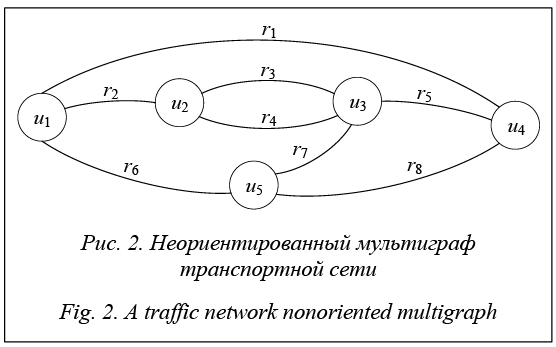
На первом этапе представим узловые пункты транспортной сети (населенные пункты, пункты перегрузки груза и смены транспорта, развилки дорог и т.д.) вершинами (узлами) графа, а пути сообщения между этими пунктами (наземные, воздушные, водные) – его ребрами. В рассматриваемом примере (см. рис. 1) эти пути выделены черными ломаными линиями. Поскольку один и тот же узел в различных случаях может быть как источником ресурса, так и его потребителем, транспортную сеть будем представлять неориентированным графом. Кроме того, исходя из логики функционирования транспортной сети, характерной особенностью данного графа является отсутствие петель (узел не может сам себе доставлять необходимый ресурс). В итоге получим мультиграф транспортной сети (рис. 2) Gп = áU, Rñ, где U={ui|i=1, 2, …, 5} – множество вершин графа; R={rk|k=1, 2, …, 8} – множество ребер графа. В общем случае Gп = áU, Rñ, где U = {ui|i = 1, 2, …, I}, I – количество вершин графа; R = {rk|k = 1, 2 , …, K}, K – количество ребер графа.
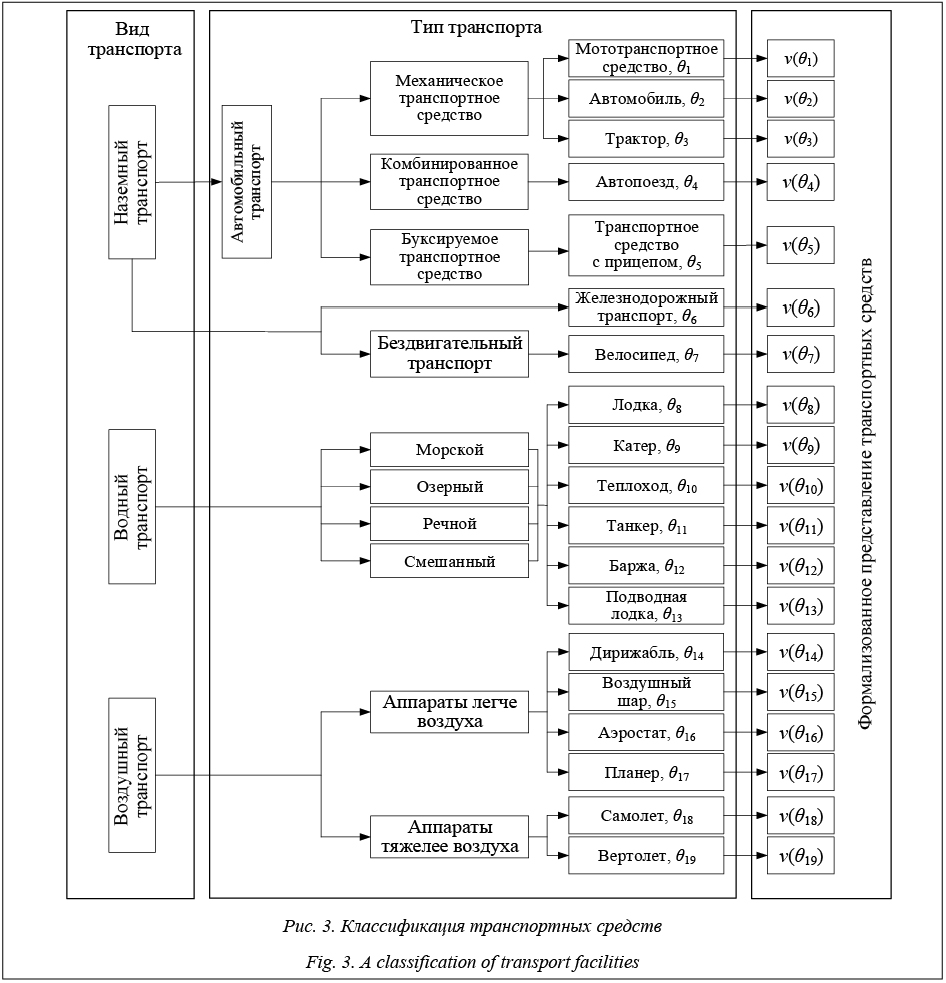
ei=[ti,ci], (2) где i = 1, 2, … ; ti – время выполнения определенных операций (время задержки) в i-м узле; ci – стоимость выполнения этих операций в i-м узле транспортной сети. Каждый участок пути транспортной сети (ребро графа) также характеризуется рядом параметров. С точки зрения времени транспортировки МТР выделим протяженность sk k-го участка пути (rk ребра графа) и качество покрытия k-го участка, определяющее скорость движения транспортного средства на данном участке (здесь имеется в виду, что в зависимости от качества дороги средняя скорость изменяется). Кроме того, сами транспортные сред- ства имеют различную среднюю скорость движе- ния v(θn), где θn – n-й тип транспортного средства, θn ∈ Θ, Θ = {θn|n = 1, 2, …, N} – множество типов транспортного средства; N – количество типов транспортных средств транспортной сети, поэтому tтр также будет различным. Исходя из вышесказанного, для моделирования транспортной сети воспользуемся формализованным представлением транспортных средств (риc. 3), то есть будем использовать общий параметр – среднюю скорость транспортировки определенным типом транспорта θn МТР по k-му участку пути – vk(θn). В предложенной классификации транспортных средств (см. рис. 3) N=19.
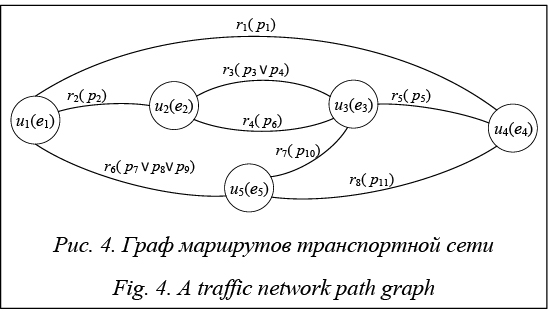
Различие видов и типов транспортных средств определяет и различие в стоимости транспортировки необходимых потребителю ресурсов по k-му участку пути. Данный параметр обозначим как ck(θn). Также необходимо учитывать время года, время суток, климатические условия (дождь, туман, го- лолед и т.д.), в которых осуществляется транспортировка МТР, поскольку данные факторы могут приводить к изменению скорости движения транспортного средства. Их влияние учтем коэффициентом скорости gk. Его значение может формироваться на основании нормативных документов (правил дорожного движения, руководств по эксплуатации транспортных средств, различных ведомственных правовых документов по безопасности движения и т.д.) и статистических данных по влиянию погоды на скорость потока транспорта. В результате имеем совокупность параметров (кортеж), характеризующих k-й участок пути: [rk, sk, θn, vk(θn), gk, ck(θn)]. Данный кортеж интерпретируется следующим образом: по k-му участку пути протяженностью sk движется транспортное средство θn со скоростью vk(θn). Коэффициент скорости на k-м участке – gk. Стоимость транспортировки МТР по k-му участку пути транспортным средством θn составляет ck(θn). Такая характеристика участка пути преобразует его в участок маршрута транспортного средства θn. Очевидно, что при наличии нескольких типов транспортных средств получим на одном и том же участке пути несколько участков маршрутов, образованных этими транспортными средствами. Представим данный кортеж в виде веса k-го ребра графа Gп (см. рис. 2): p=[rk, sk, θn, vk(θn), gk, ck(θn)]. Совокупность различных весов, характеризующих ребра графа, образует множество весов P = {pl|l=1, 2, …, L}, где L – количество весов ребер. При наличии нескольких типов транспортных средств, доставляющих ресурсы по одному и тому же участку пути (ребру), например θn и θm, где θn, θm∈Θ (см. рис. 3), получим дизъюнкцию различных весов ребра графа, например (pl Ú pl+1), где pl = [rk, sk, θn, vk(θn), gk, ck(θn)] и pl+1 = [rk, sk, θm, vk(θm), gk, ck(θm)], pl, pl+1∈P. То есть с учетом вышеизложенного на k-м участке пути имеем два участка маршрута транспортных средств – θn и θm. Исходя из этого, в общем случае индекс веса ребра графа не будет совпадать с индексом ребра. Таким образом, нагрузка вершин и ребер графа Gп преобразует существующие пути транспортной сети в маршруты транспортировки МТР. Другими словами, маршрут – это нагруженный путь, а нагруженный граф Gп – это граф Gм маршрутов транспортировки МТР. При переходе от графа Gп к графу Gм необходимо учесть следующее. Поскольку граф путей транспортной сети неориентированный и перевозка материальных средств в различных условиях обстановки возможна как в прямом, так и в обратном направлениях, вес ребра для обоих направлений будет одинаковым. Абстрагируемся от реальных условий и в произвольном порядке нагрузим граф Gп (рис. 2) рассматриваемой транспортной сети (рис. 1). В результате получим граф маршрутов Gм (рис. 4).
В общем виде граф маршрутов транспортной сети опишется выражением
Веса вершин и ребер графа (см. рис. 4) могут выступать в качестве их идентификаторов. Поэтому граф маршрутов опишем матрицей смежности взвешенного графа (весовой матрицей смежности) S(Gм)=[sij]IxI вида
В результате весовая матрица смежности S(Gм) для рассматриваемого графа Gм будет иметь следующий вид:
Пустые ячейки означают нулевые элементы матрицы. Отсутствие петель в графе Gм характеризует нулевая главная диагональ матрицы смежности S(Gм). Все возможные маршруты между вершинами Gм могут быть получены с помощью матрицы достижимости [6]:
где d(Gм) – диаметр графа Gм. Под диаметром графа Gм будем понимать максимальную длину простой цепи между вершинами ui и uj данного графа. В нашем случае d(Gм) = 4. Поскольку необходимо получить маршрут от i-й вершины к j-й в виде перечисления ребер, а для нагруженного графа – весов ребер, возведение матрицы смежности S(GМ)=[sij] в n-ю степень будем выполнять по известному правилу перемножения матриц, но при этом операцию умножения будем рассматривать как конкатенацию (приписывание справа к содержимому соответствующего элемента i-й строки содержимого соответствующего элемента j-го столбца), то есть стыковку соответствующих весов друг за другом, а операцию сложения полученных в результате умножения слов – как дизъюнкцию. Конкатенация с нулевым элементом даст в итоге нулевой элемент (отсутствие ребра означает обрыв пути). Суммирование матриц (6) также будем выполнять в соответствии с общеизвестным правилом, но по аналогии операцию сложения заменим операцией дизъюнкции. Тогда (6) запишется в виде
Для рассматриваемого графа GМ
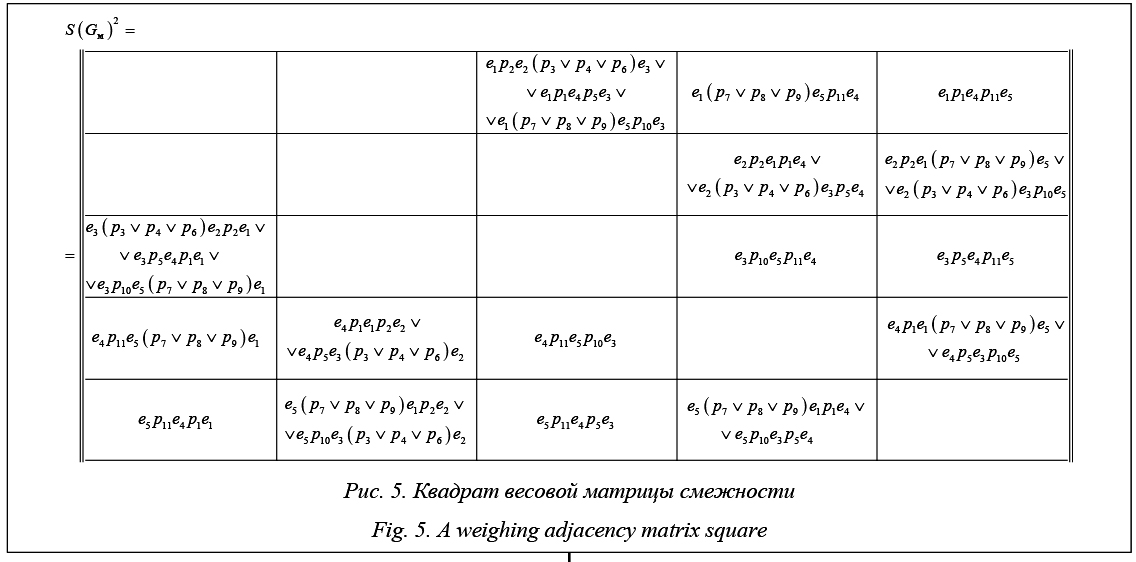
Поскольку в транспортной сети СМТО исключены ситуации, когда промежуточные пункты для одного маршрута транспортировки повторяются, при формировании матрицы достижимости необходимо учитывать только простые маршруты, исключив циклы, то есть повторения вершин графа между начальным ei и конечным ej узлами маршрута: ei≠⋅⋅⋅≠ eq ≠⋅⋅⋅≠ ej. В соответствии с (8), для примера найдем квадрат весовой матрицы смежности рассматриваемого графа S(Gм)2=S(Gм)·S(Gм), включив в конкатена- цию веса вершин графа (см. рис. 5).
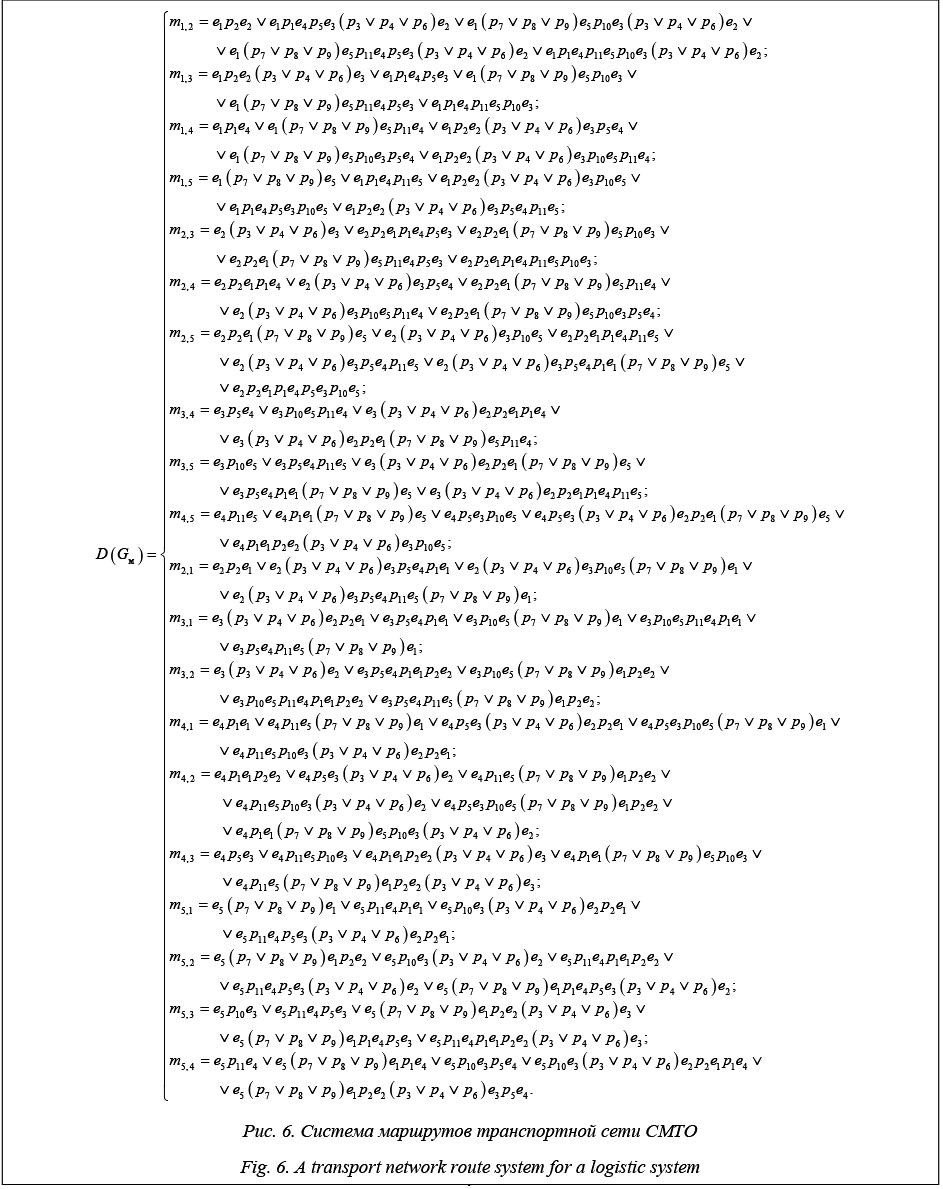
По аналогии, найдя третью S(Gм)3=S(Gм)2´ ´S(Gм) и четвертую S(Gм)4=S(Gм)3´S(Gм) степени матрицы смежности графа Gм, получим матрицу достижимости D(Gм):
Содержимое ячеек матрицы (9) представлено системой, которая полностью определяет систему маршрутов транспортной сети СМТО (см. рис. 6). Таким образом, получена пространственно-временная модель H транспортной сети СМТО эксплуатации группировки РЭС, которая представляет собой совокупность графа (8) и матрицы достижимости (рис. 6): H = áGм, D(Gм)ñ. В общем виде модель запишется следующим образом:
Данная модель является основой разработанного программного продукта [10], обеспечивающего выбор оптимального маршрута транспортировки МТР в СМТО эксплуатации группировки РЭС. Литература 1. Игнатьев С.В., Зосиев В.В., Черняк А.В., Малышев А.В. Функциональная структура системы поддержки принятия реше- ния технического диагностирования радиоэлектронной аппаратуры // Актуальные проблемы вузов ВВС: межвуз. сб. Вып. 21. 2006. С. 87–94. 2. Давыдов П.С. Техническая диагностика радиоэлектронных систем. М.: Радио и связь, 1988. 256 с. 3. Барзилович Е.Ю. Модели технического обслуживания сложных систем. М.: Высш. школа, 1982. 231 с. 4. DSlib (2016). URL: http://www.dslib.net/sys-analiz/ sistema-informacionoj-podderzhki-prinjatija-dlja-tehnicheskogo-obsluzhivanija-i.html (дата обращения: 12.02.2017). 5. Дорохов А.Н., Керножицкий В.А., Миронов А.Н., Ше- стопалова О.Л. Обеспечение надежности сложных технических систем. СПб: Лань, 2016. 352 с. 6. Игнатьев С.В., Тихонов В.Б., Красников А.В., Оси- пов А.А. Анализ системы материально-технического обеспечения эксплуатации зенитного ракетного вооружения // Вестн. Ярослав. ВВУ ПВО. 2016. Вып. 2. С. 52–57. 7. Оре О. Теория графов. М.: Наука, 1980. 336 с. 8. Горбатов В.А., Горбатов А.В., Горбатова М.В. Дискрет- ная математика. М.: Астрель, 2003. 447 с. 9. Кристофидес Н. Теория графов. Алгоритмический подход. М.: Мир, 1978. 432 с. 10. Игнатьев С.В., Тихонов В.Б., Осипов А.А. и др. Модель движения материальных потоков системы материально-технического обеспечения радиоэлектронной аппаратуры: Свид. о регистр. прогр. для ЭВМ № 2016610952; Рос. Федерация. Дата регистрации 22.01.2016. |
 (3)
(3) (4)
(4) (5)
(5) (6)
(6) (7)
(7) (8)
(8)
 (9)
(9)
 (10)
(10)
| Permanent link: http://swsys.ru/index.php?id=4323&lang=en&page=article |
PDF version article Full issue in PDF (21.91Mb) Download the cover in PDF (0.59Мб) |
| The article was published in issue no. № 3, 2017 [ pp. 510-516 ] |
Perhaps, you might be interested in the following articles of similar topics:
- Модель группировки радиоэлектронных систем для оценки временных показателей надежности
- Фазовый переход наработки на отказ в растущих вычислительных сетях
- Технологические процессы с гибкими связями типа «звезда» для интерактивных программных систем
- Интеллектуальный подход к автоматизации технологических и производственных процессов
- Алгоритмы навигации на внешней поверхности модели международной космической станции
Back to the list of articles