Journal influence
Bookmark
Next issue
The dynamic form model of radar target priorities using fuzzy logic methods
Abstract:The paper focuses on creating a cognitive resource management system for a multifunctional multi-channel radar with an active phased antenna array. The author has developed a control system archi-tecture based on a radar scheduler, which provides an optimal distribution of the last resources of the radar, such as time, energy, and computing. We have created a simplified verification model of the ra-dar station, which makes it possible to automate the development and debugging of the components of the radar resource management system. To solve the problem of resource allocation, the author suggests implementing the concept of a cog-nitive management system for the case when the system plans its actions based on the analysis of the external situation and its internal state. The paper schematically describes the estimates and forecasts of the employment of energy and computing resources by using the thermal model of the transceiver modules and the model of the primary radar information processing path. The paper describes the designated efficient use of time resources because of the dynamic prioriti-zation of problems for tracking radar targets using fuzzy logic methods. The author shows how the proposed method of prioritizing radar targets affects the distribution of radar resources in situations of capacity overload when it is necessary to decide about which problems and for which goals to perform within the established time limits, and which can be queued or reset. The object of the paper is to show the results of modeling the module for prioritizing tracking problems, considering such parameters as speed, range, the direction of movement, and quality of target tracking.
Аннотация:Статья посвящена созданию когнитивной системы управления ресурсами многофункциональной многоканальной радиолокационной станции с активной фазированной антенной решеткой. Автором разработана архитектура системы управления на основе радарного планировщика, обеспечивающего оптимальное распределение конечных ресурсов радара, таких как временные, энергетические и вычислительные. Создана и описана упрощенная верификационная модель радиолокационной станции, позволяющая автоматизировать процесс разработки и отладки компонентов системы управления ресурсами радара. Для решения проблемы распределения ресурсов предлагается реализация концепции когнитивной системы управления для случая, когда система планирует свои действия на основе анализа внешней обстановки и своего внутреннего состояния. В статье схематично описываются модели оценки и прогнозирования занятости энергетических и вычислительных ресурсов за счет использования термической модели приемопередающих модулей и модели тракта обработки первичной радиолокационной информации. Подробно описывается метод эффективного использования временных ресурсов за счет динамического формирования приоритетов заданий на сопровождение радиолокационных целей с помощью нечеткой логики. Показано, как предложенный метод приоритизации радиолокационных целей влияет на распределение ресурсов радара в ситуациях перегрузки пропускной способности, когда необходимо решать, какие задачи и по каким целям выполнять в установленных временных ограничениях, а какие могут быть поставлены в очередь либо сброшены. Целью статьи является демонстрация результатов моделирования работы модуля приоритизации заданий на сопровождение с учетом таких параметров, как скорость, дальность, направление движения и качество сопровождения цели.
| Authors: A.A. Nepryaev (nepryaev@cps.tver.ru) - R&D Institute Centerprogramsystem (Сhief Specialist), Tver, Russia | |
| Keywords: resource allocation, multifunction radar, radar station, fuzzy logic, priority, phased array radar |
|
| Page views: 5691 |
PDF version article |
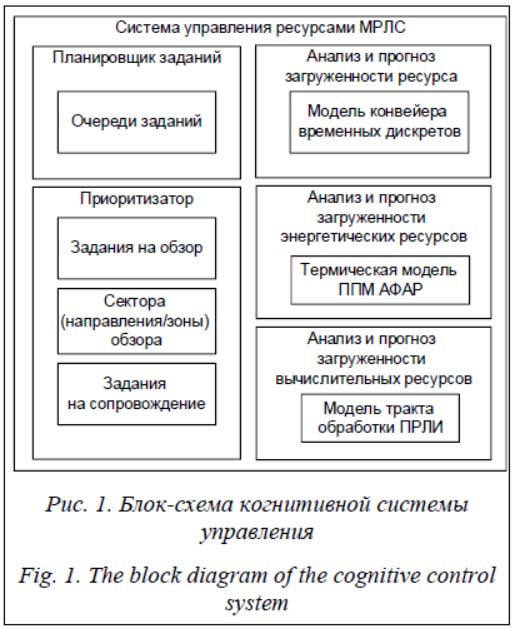
Когнитивная система управления многофункциональной радиолокационной станцией (МРЛС) с активной фазированной антенной решеткой (АФАР) функционирует в цикле восприятия–действия исходя из концепции когнитивного радара [1]. Она способна автономно корректировать свои эксплуатационные параметры и планировать работу на более длительные периоды времени. Основная функция такой системы – оптимизировать процесс управления распределением и перераспределением ограниченных временных, энергетических и вычислительных ресурсов между различными задачами. При этом организовать совместное использование ресурсов МРЛС несколькими задачами весьма сложно и обусловлено случайным характером возникновения запросов на потребление ресурсов. Центральную роль в управлении ресурсами играет многофункциональный радиолокацион-ный планировщик [2], обеспечивающий эф-фективное планирование последовательностей измерений (излучение–прием), которые должны быть выполнены, при условии соблюдения требований, предъявляемых к производительности МРЛС, и заданных ограничений, таких как сроки выполнения и доступные ресурсы. Однако алгоритмы работы планировщиков, представленные в [3, 4], предполагают, что принятие решений о распределении ресурсов должно опираться на относительные приоритеты задач МРЛС и временные ресурсы, но без учета энергетических и вычислительных. Такой подход не является оптимальным с точки зрения распределения ресурсов и времени планирования заданий. Для устранения этих недостатков разработана архитектура когнитивной системы управления ресурсами на основе дополненного алгоритма планировщика Ормана [5]. Показана реализация модуля приоритизации радиационных целей, который в отличие от [6, 7], где все задачи слежения имеют одинаковый приоритет, обеспечивает динамическое формирование приоритетов заданий на обновление траекторий и адаптивное распределение ресурсов. Архитектура системы управления Для формирования временной диаграммы работы МРЛС планировщик исполнения заданий размещает элементы временной связки каждого задания на конвейере временных дискретов [8]. Работа планировщика заданий основана на использовании многоуровневых очередей заданий с обратной связью. Обратная связь с планировщиком обеспечивается постоянной передачей данных о реально достигнутой временной загрузке приемопередающего тракта, а также о наличии вычислительных и энергетических ресурсов. На основе данной информации планировщик корректирует границы коридора планирования заданий, что позволяет увеличивать интервал обновления и наиболее оптимально распределять доступные ресурсы времени между задачами.
- необходимым упреждением по времени размещения задания на конвейере временных дискретов для возможности его исполнения элементами приемопередающего тракта; - ограничениями на время исполнения задания, являющимися важными для высокоприоритетных заданий на подтверждение и обновление траектории; - ограничениями на наличие вычислительных ресурсов, необходимых для обработки первичной радиолокационной информации (ПРЛИ); - ограничениями на наличие энергетических ресурсов, обусловленными уровнем выходной мощности (температурным режимом работы) приемопередающих модулей (ППМ) [9]. После этого выполняется поиск свободного временного интервала на конвейере временных дискретов с учетом указанных ограничений.
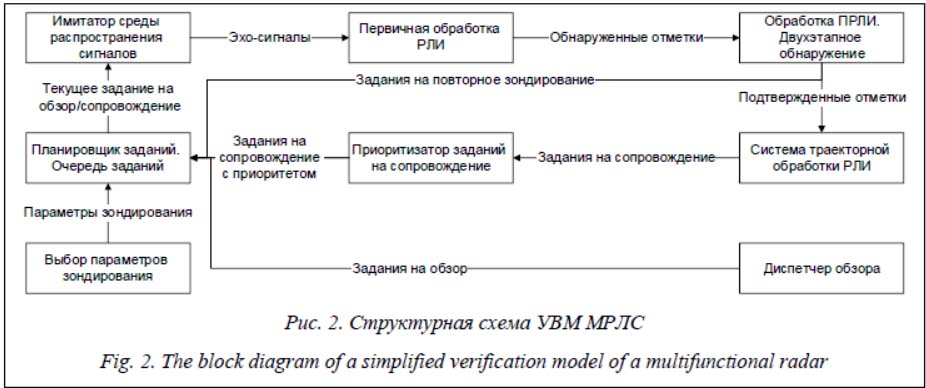
Таким образом, за счет приоритизации и планирования заданий с учетом вычислительных и энергетических ограничений данная система позволяет увеличивать интервал планирования, равномерно загружать вычислительные мощности и оптимально распределять энергию импульсов ППМ в соответствии с очередью заявок. Упрощенная верификационная модель
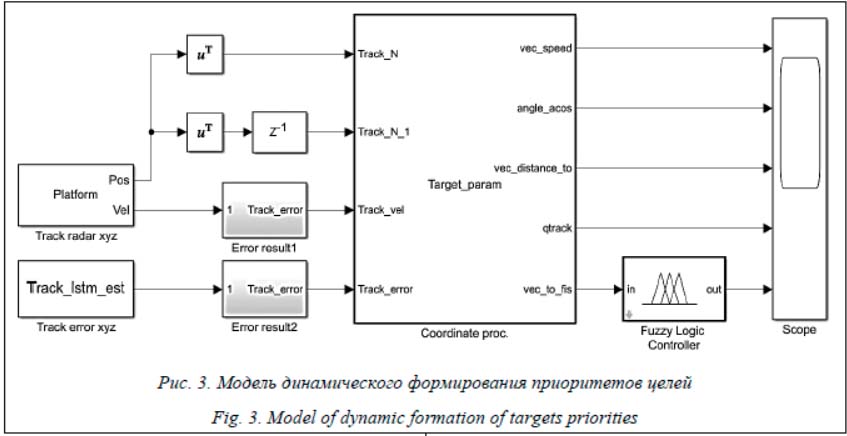
Структура системы основана на использовании активных распределенных взаимодействующих компонентов, которые связаны потоками управляющих сообщений и данных с результатами вычислений. Таким образом, рассматриваемая архитектура имеет черты многоагентной системы. Функцию обзора просматриваемого пространства, разделенного на сектора с различными приоритетами, обеспечивает «Диспетчер обзора». При этом каждый сектор обслуживается отдельным активным объектом диспетчера, который периодически формирует мно-жество заданий на обзор своего сектора. «Пла-нировщик заданий» формирует задания на зондирование направлений на основе заявок на обновление траекторной информации от блока «Система траекторной обработки РЛИ», обеспечивая выполнение функции активного со-провождения целей. В данном примере вместо фильтра Калмана, широко применяемого при траекторной обработке, использована рекуррентная нейронная сеть с долгой краткосрочной памятью [12, 13]. Блок «Приоритизатор заданий на сопровождение» динамической приоритизации заданий, использующий информацию о характере движения сопровождаемых целей и точности измерения кинематических параметров, обеспечивает адаптацию системы к изменяющейся внешней обстановке. За счет ранжирования заданий согласно их приоритету в блоке «Планировщик заданий» планировщик исполнения заданий выполняет размещение элементов временной связки каждого задания на конвейере временных дискретов и на основе данных о реально достигнутой временной загрузке приемопередающего тракта производит коррекцию коридора планирования заданий. Результаты измерений параметров обнаруженных радиолокационных объектов, полученные от системы первичной обработки радиолокационной информации (РЛИ), регистрируются элементом «Обработка ПРЛИ». На основе результатов измерений по заданиям на обзор формируются высокоприоритетные задания на повторные зондирования, обеспечивающие выполнение функции двухэтапного обнаружения. Подтвержденные обзорные измерения, а также полученные по заданиям на обновление траекторной информации поступают в систему траекторной обработки. В блоке «Выбор параметров зондирования» производится выбор параметров каждого зада-ния на основе приоритета, пространственных характеристиках зондирования, требуемых вероятности правильного обнаружения и ложной тревоги. К этим параметрам относятся тип ис-пользуемого в зондировании сигнала, длительность импульса, количество импульсов и период их повторения для пачечных сигналов, параметры приема и обработки принятого сигнала. Модель приоритизатора Описание модели. Для модельно-ориентированного проектирования и моделирования работы модуля «Приоритизатор заданий на сопровождение» использовалась среда графического программирования Simulink на основе MATLAB. На рисунке 3 представлена структурная схема, состоящая из следующих компонентов [14, 15]: Track radar xyz – выдает координаты подтвержденных отметок и скорость цели; Track error xyz – выдает ошибки предсказанных положений цели от траекторной обработки; Error result1 – вычисляет результирующий вектор скорости цели; Error result2 – вычисляет результирующий вектор между предсказанным положением цели и измеренным, то есть параметр, определяющий качество сопровождения цели; Coordinate proc. – на основании полученных координат отметок от цели осуществляет вычисление направления движения и дальности до цели; Fuzzy Logic Controller – принимая значения скорости, дальности, направления движения и качества сопровождения цели, выдает значение приори-тета; Scope – отображает сигналы, сгенерированные в процессе моделирования.
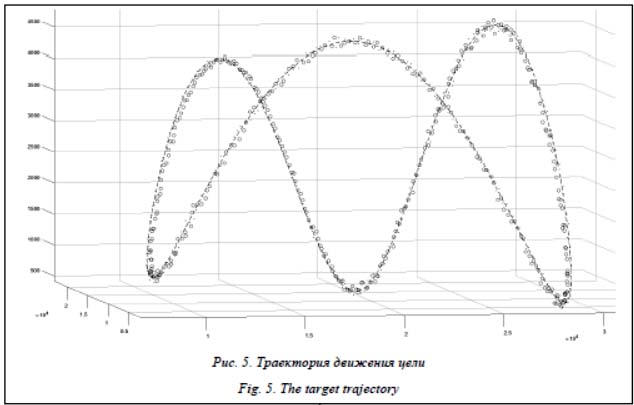
На рисунке 5 изображена траектория движения цели, используемая для проверки работы блока приоритизатора. Пунктирная линия обозначает реальную траекторию движения, точки – отметки на выходе блока «Обработка ПРЛИ», символы «○» – предсказанные отметки на выходе блока «Система траекторной обработки РЛИ». На графике видно, как ошибка прогноза положения цели увеличивается с расстоянием до цели и на нелинейных участках движения. Нечеткая логика. Модель динамического формирования приоритетов целей основана на каскадной продукционной нечеткой системе и нечетком алгоритме логического вывода Мамдани (см. http://www.swsys.ru/uploaded/image/2021-2/2021-2-dop/22.jpg) [16]. Входными переменными являются дистанция, направление, скорость и качество сопровождения. Для каждой переменной определены базовые терм-множества, их область определения (универсумы), функции принадлежности на основе Z-образных и S-образных функций принадлежности для входных значений, сигмоидальных для выходного, построены правила нечетких продукций для системы нечеткого вывода о величине приоритета.
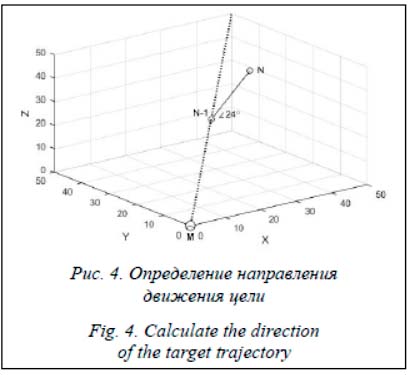
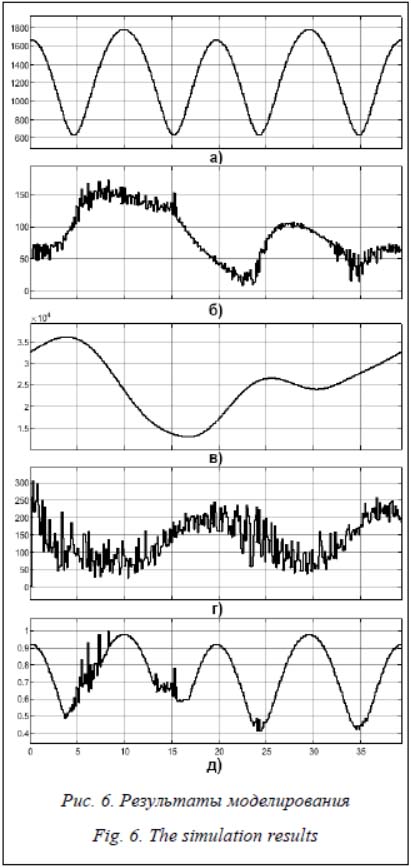
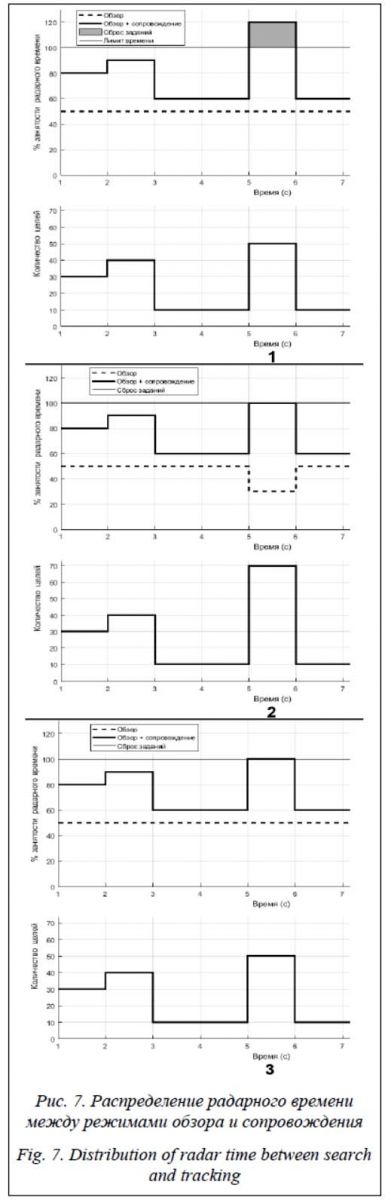
Выходная переменная ставится в соответствие входным согласно базе правил нечетких продукций. Для системы нечеткого вывода качества сопровождения база правил состоит из 15 правил (см. http://www.swsys.ru/uploaded/image/2021-2/2021-2-dop/20.jpg). Результаты моделирования На рисунке 6 показаны графики результатов моделирования работы блока «Приоритизатор заданий на сопровождение». Графики отобра-жают траекторию движения цели (рис. 5) и содержат значения: изменения скорости цели (км/ч); значения изменения направления дви-жения цели в градусах (рис. 4); значения из-менения расстояния до цели в метрах; значения величины ошибки траекторной обработки, качество сопровождения; значения величины рассчитанного приоритета цели. Распределение радарного времени Для демонстрации влияния приоритизации заданий на сопровождение приводится пример распределения радарного времени между режимами обзора и сопровождения в ситуции перегрузки.
1. Задания на обзор всегда занимают 50 % радарного времени. Когда количество заплани-рованных заданий на отслеживание целей превышает допустимый порог, обусловленный наличием ресурсов радара, происходит сброс этих заданий в момент времени 5 с. 2. Задания на сопровождение имеют максимальный приоритет и занимают требуемый объем радарного времени. Когда количество запланированных заданий на отслеживание целей превышает допустимый порог, обусловленный наличием ресурсов радара, происходит сброс заданий на обзор в момент времени 5 с. 3. Задания на обзор всегда занимают 50 % радарного времени (подразумевается, что все задания обзора выполняются). Когда количе- Таким образом, перераспределение радарного времени между задачами выполняется согласно их приоритету, что обеспечивает постоянный обзор пространства и повышение качества сопровождения наиболее опасных целей в ситуациях перегрузки и функционирования в сложной динамически изменяющейся обстановке. Заключение
Литература 1. Непряев А.А., Шпигарь А.Н. Концепция когнитивного радара // Научный форум: Технические и физико-математические науки: сб. стат. по матер. XXXVI Междунар. науч.-практич. конф. 2020. № 7. С. 4–11. 2. Orman A.J., Potts C.N., Shahani A.K., Moore A.R. Scheduling for a multifunction array radar system. EJOR, 1996, vol. 90, pp. 13–25. DOI: 10.1016/0377-2217(95)00307-x. 3. Sabatini S., Tarantino M. Multifunction Array Radar: System Design and Analysis. USA, Massachusetts, Boston, Artech House Publ., 1994, 271 p. 4. Butler J.M. Multi-function radar tracking and control. PhD thesis, UCL, 1998, pp. 93–95. 5. Непряев А.А. Метод управления многофункциональной радиолокационной станцией с учетом временных, вычислительных и энергетических ресурсов // Вопросы технических и физико-математических наук в свете современных исследований: сб. стат. по матер. XXXI Междунар. науч.-практич. конф., 2020, № 9. С. 4–11. URL: https://sibac.info/conf/technology/24/187746 (дата обращения:10.12.2020). 6. Lu J.B. Theory and Method of Resource Optimization and Management for Phased Array Radars. Changsha, PhD Thes., National Univ. of Defense Technology, 2007, pp. 134–139. 7. Hu W.D., Yu W.X., Lu J.B. et al. Theory and Method of Resource Management for Phased Array Radars. Beijing, National Defense Industry Press, 2010. 8. Золотарев М.М., Прусаков А.В., Толкачев А.А., Топчиев С.А., Фарбер В.Е. Вопросы создания информационной структуры многофункциональных РЛС с ФАР // Радиотехника. 2006. № 4. С. 16–23. 9. Ghosh S., Hansen J., Rajkumar R., Lehoczky J. Integrated resource management and scheduling with multi-resource constraints. XXV IEEE Intern. Real-Time Systems Symposium, 2004, pp. 12–22. DOI: 10.1109/REAL.2004.25. 10. Balakin D.A., Kersky E.V. Development of a digital twin for an early-warning radar system. Journal of ²Almaz-Antey² Air and Space Defence Corporation, 2020, no. 1, pp. 10–18. DOI: 10.38013/2542-0542-2020-1-10-18. 11. MathWorks. Adaptive Tracking of Maneuvering Targets with Managed Radar. URL: https://www.mathworks.com/help///fusion/examples/search-and-track-scheduling-for-multifunction-phased-array-radar.html (дата обращения: 11.12.2020). 12. Li S., Hu C., Wang R., Zhou C., Yang J. A maneuvering tracking method based on LSTM and CS model. Proc. ICSIDP, 2019, pp. 1–4. DOI: 10.1109/ICSIDP47821.2019.9173187. 13. MathWorks. Time Series Forecasting Using Deep Learning. URL: https://www.mathworks.com/help/deeplearning/ug/time-series-forecasting-using-deep-learning.html (дата обращения: 11.12.2020). 14. Ding Z. A survey of radar resource management algorithms. Proc. CCECE, 2008, pp. 9–10. DOI: 10.1109/CCECE.2008.4564804. 15. Li X., Yi W., Zhang T., Cui G., Kong L., Yang X. Adaptive resource management based on target priority in the radar networks. Proc. IET Intern. Radar Conf., 2015, pp. 1–6. DOI: 10.1049/cp.2015.1325. 16. Khomeiny A.T., Kusuma T.R., Handayani A.N. Grading system recommendations for students using fuzzy Mamdani logic. Proc. ICOVET, 2020, pp. 1–6. DOI: 10.1109/ICOVET50258.2020.9230299. References
|
| Permanent link: http://swsys.ru/index.php?id=4816&lang=en&page=article |
Print version |
| The article was published in issue no. № 2, 2021 [ pp. 281-288 ] |
Perhaps, you might be interested in the following articles of similar topics:
- Модели анализа и прогноза загруженности вычислительных и энергетических ресурсов радиолокационной станции
- Управление проектом по созданию программной системы электронного документооборота
- Основы структурно-лингвистического подхода в анализе нечетких временных рядов
- Организация адаптивной маршрутизации данных в электроэнергетических комплексах с использованием онтологических нечетких классификаторов
- Разработка алгоритмов функционирования математической модели дирижабельного радиолокационного комплекса обнаружения малозаметных воздушных целей
Back to the list of articles